1. RUMBA 보드와 Hall Sensor Endstop
먼저, 토요일날 오전에 도착한 reprapdiscount에서 주문한 상품들입니다.
페덱스로 배송이 되었는데, 역시 페덱스 클라스.... RC마을에서 주문한 물건보다 홍콩에서 주문한 물건이 먼저 왔습니다. ㅋㅋㅋ
사실, 금요일 오후에 한 번 왔었는데, 제가 핸드폰을 집에 놓고 도서관에 공부하러 간 동안이라 받지 못했습니다.
여튼, 페덱스는 15달러의 기적이었습니다.

<배송된 모습>
페덱스 찬양은 이정도로 하고, 본격적으로 제품을 봅시다.

<주문한 상품들>
각 제품들은 왼쪽 위부터 시계방향으로 각각
1. RUMBA 보드
2. 모터, 엔드스탑, 팬, 서미스터용 전선
3. Hall sensor Endstop
4. Pololu A4988 스텝모터 드라이버
입니다.
RUMBA 보드가 들어있는 상자의 구성품은 다음과 같습니다.

<RUMBA 보드 구성품>
RUMBA보드, 40mm 팬, 알루미늄 GT2 벨트풀리 3개, 무두볼트 6개, 1.5mm 육각렌치, 스텝모터 배선용 전선, 100k 정밀 서미스터 6개, SD카드 어댑터, 스텝모터 드라이버용 방열판 6개
정말 풍성한 구성품입니다. 사실, 여기에 전선 세트도 포함되어 있습니다.
RUMBA 보드가 80달러인데, 정말 감동적인 구성입니다.
reprapdiscount가 홍콩에 있어서 걱정을 많이 했는데, 다른 중국 업체들과는 다르네요.
앞으로도 reprapdiscount를 많이 이용하게 될 것 같습니다.
reprapdiscount 찬양도 그만두고, 가장 중요한 RUMBA 보드를 자세히 보도록 합시다.
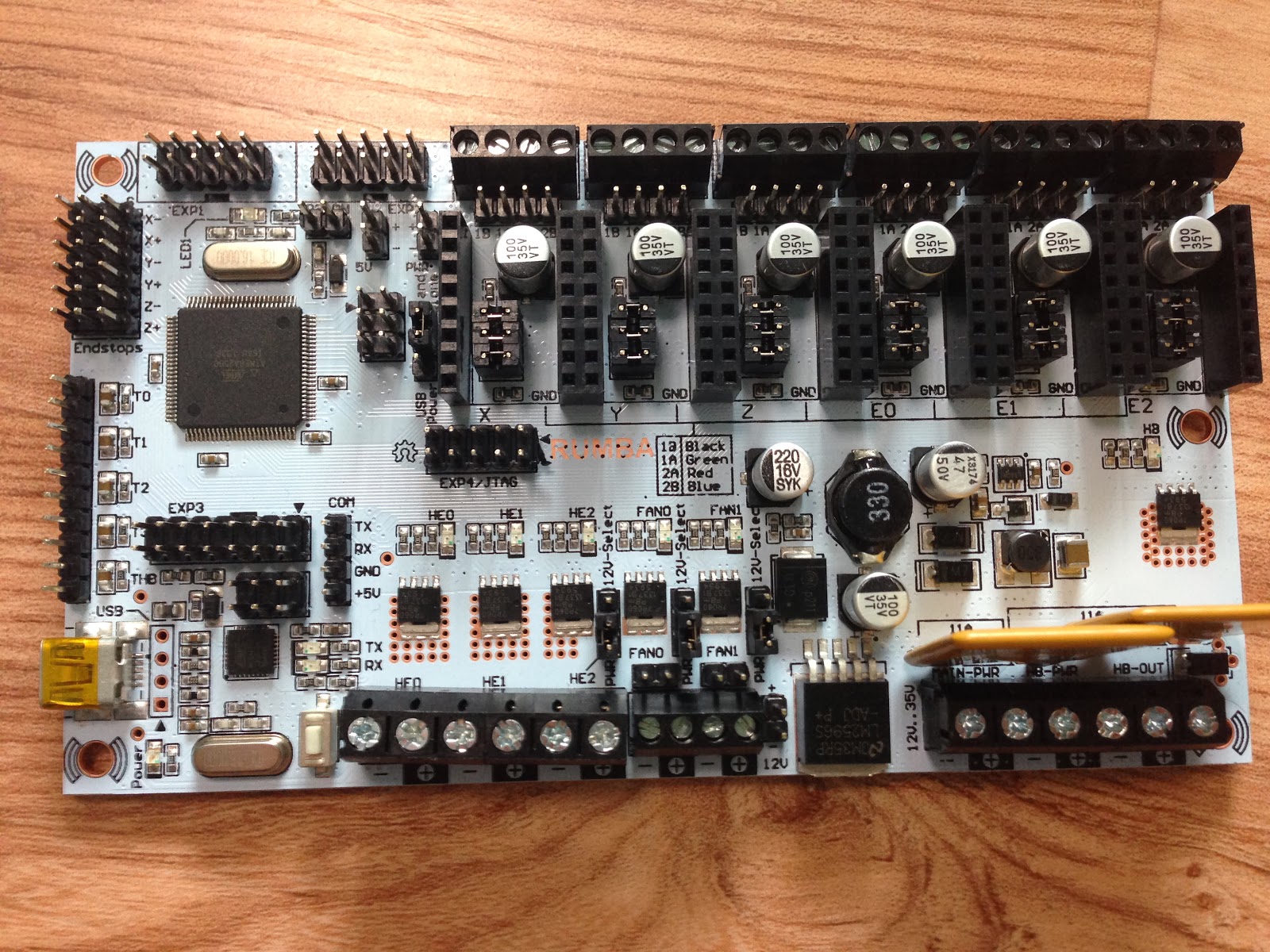
<RUMBA 보드>
RUMBA 보드는 RAMPS 기반 3D 프린터 제어보드입니다. 일단 Arduino MEGA 2560이 내장되어있고, X,Y,Z축, 3개의 익스트루더를 지원합니다. 기본적으로 제어가 가능한 팬 포트 2개가 내장되어 있습니다.
이 외에도, 모터와 핫베드, 핫엔드, 팬 전선을 핀헤더와 단자대 두 가지로 연결 가능합니다. 고전류가 흐를 경우에 대비한 형태입니다.
입력 전원도 12V 이상의 전압을 입력받을 수 있고, 팬, 핫엔드, 핫베드의 작동 전압을 12V와 입력 전압 중 선택할 수 있습니다. 스위칭 레귤레이터가 내장되어 있어 전류 공급도 안정적입니다.
저는 3DR이 이 보드 사용을 전제로 설계되었기에(그래봤자 고정용 볼트 구멍 위치만 이 보드에 맞춘 것입니다.)RUMBA 보드를 선택했습니다만, 실제로 받아보니 생각보다 훨씬 좋았습니다.
3D 프린터를 새로 제작하시는 분이라면, RAMPS보단 RUMBA를 추천드립니다.
어차피 아두이노 호환보드인 것은 마찬가지라 기능은 거의 같습니다.
하지만, RUMBA보드의 확장성이나 편의성이 더 뛰어나고, 기판이 한 층으로 되어있어 거치나 냉가 등이 수월합니다.

<전선 세트>
이 전선 세트 또한 RUMBA 보드의 구성품 중 하나입니다.
왼쪽부터 모터용 전선, 엔드스탑용 전선, 팬 및 서미스터용 전선입니다.
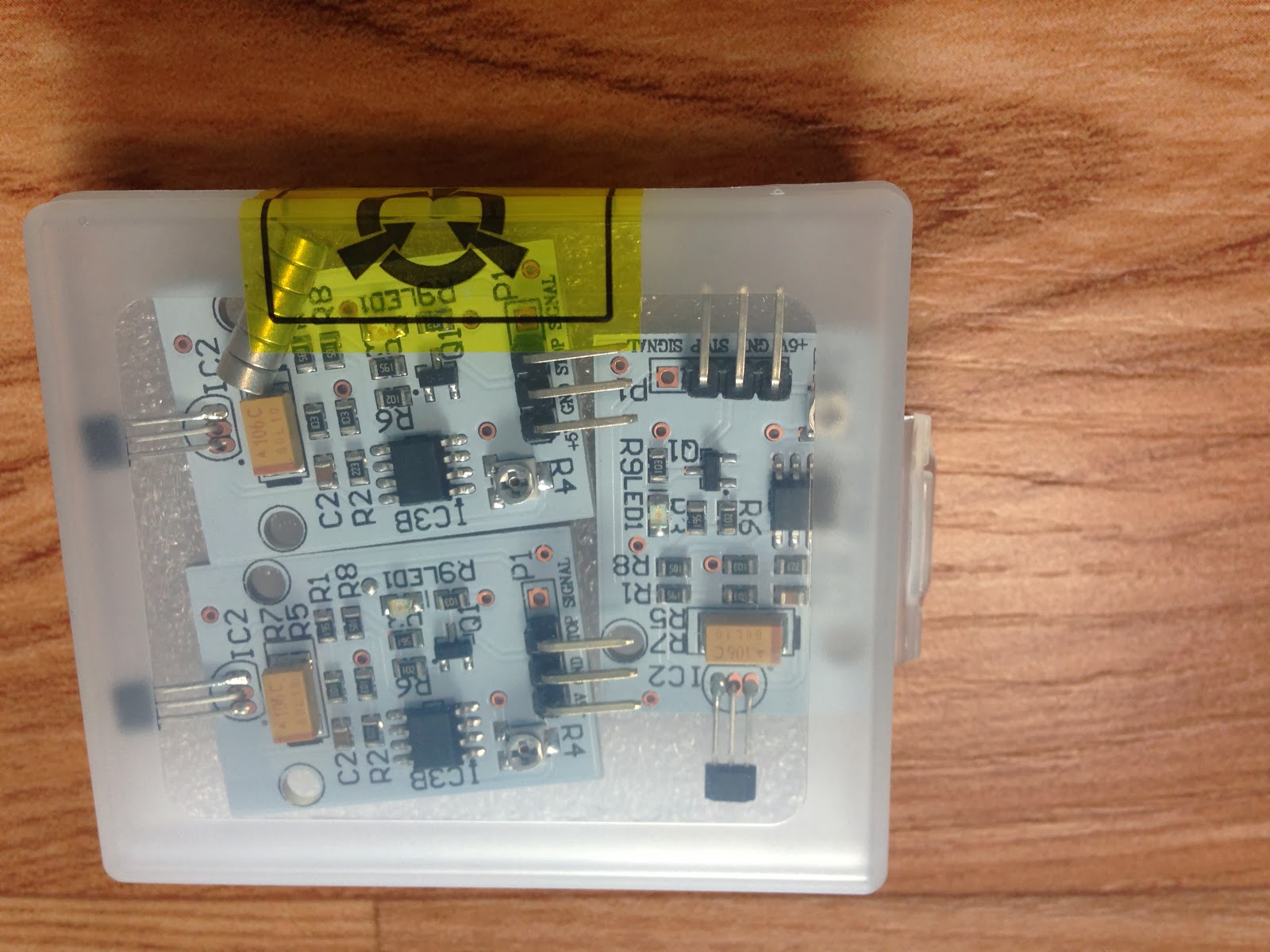
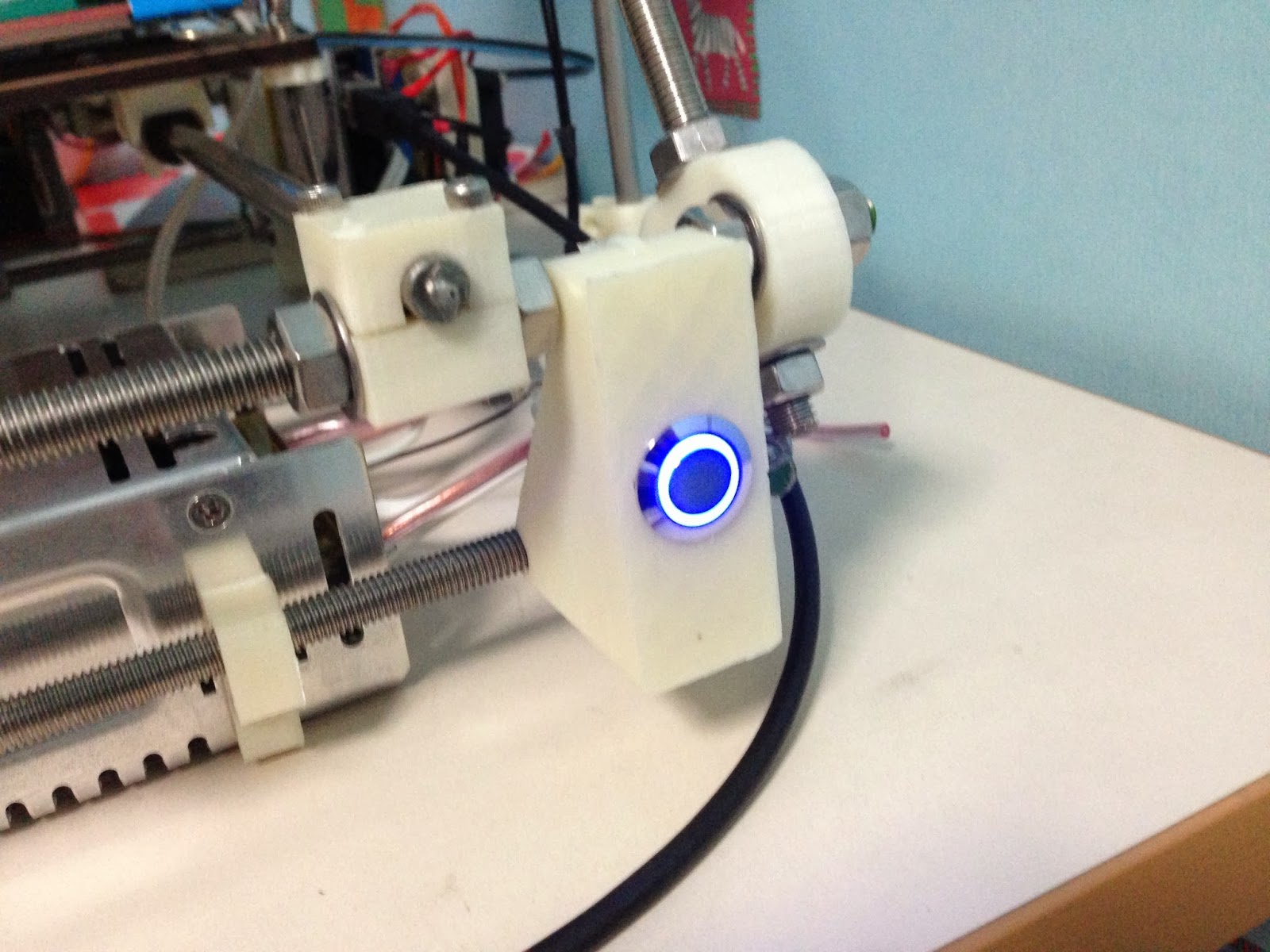
<Hal Sensor Endstop>
일반적인 엔드스탑은 마이크로 스위치를 이용해 기계적인 눌림을 감지하거나, 포토인터럽터를 이용해 빛이 가려지는 것을 이용합니다.
반면, 이 엔드스탑은 홀센서를 이용해 자석의 자기장을 감지합니다.
마이크로 스위치를 이용한 방식이나 포토 인터럽터를 이용한 방식은 엔드스탑의 위치를 바꾸려면 일일히 엔드스탑을 옮겨야 하지만, 홀센서 엔드스탑은 가변저항을 조절하면 홀센서의 감도를 변화시켜 쉽게 엔드스탑의 정지 위치를 변경 가능합니다.
저는 딱히 이 기능이 필요했다기 보다는 3DR이 이 엔드스탑을 사용하도록 설계되어 있어서 이를 사용했습니다.
이 엔드스탑은 reprapdiscount에서만 판매중입니다.
제가 reprapdiscount에서 부품을 주문한 가장 큰 이유가 바로 이 엔드스탑입니다.

<Pololu A4988 스텝모터 드라이버>
스테핑 모터를 구동시키는 드라이버입니다.
최대 2A의 전류까지 구동 가능합니다.
reprap의 표준처럼 사용되는 드라이버니 설명은 생략하겠습니다.
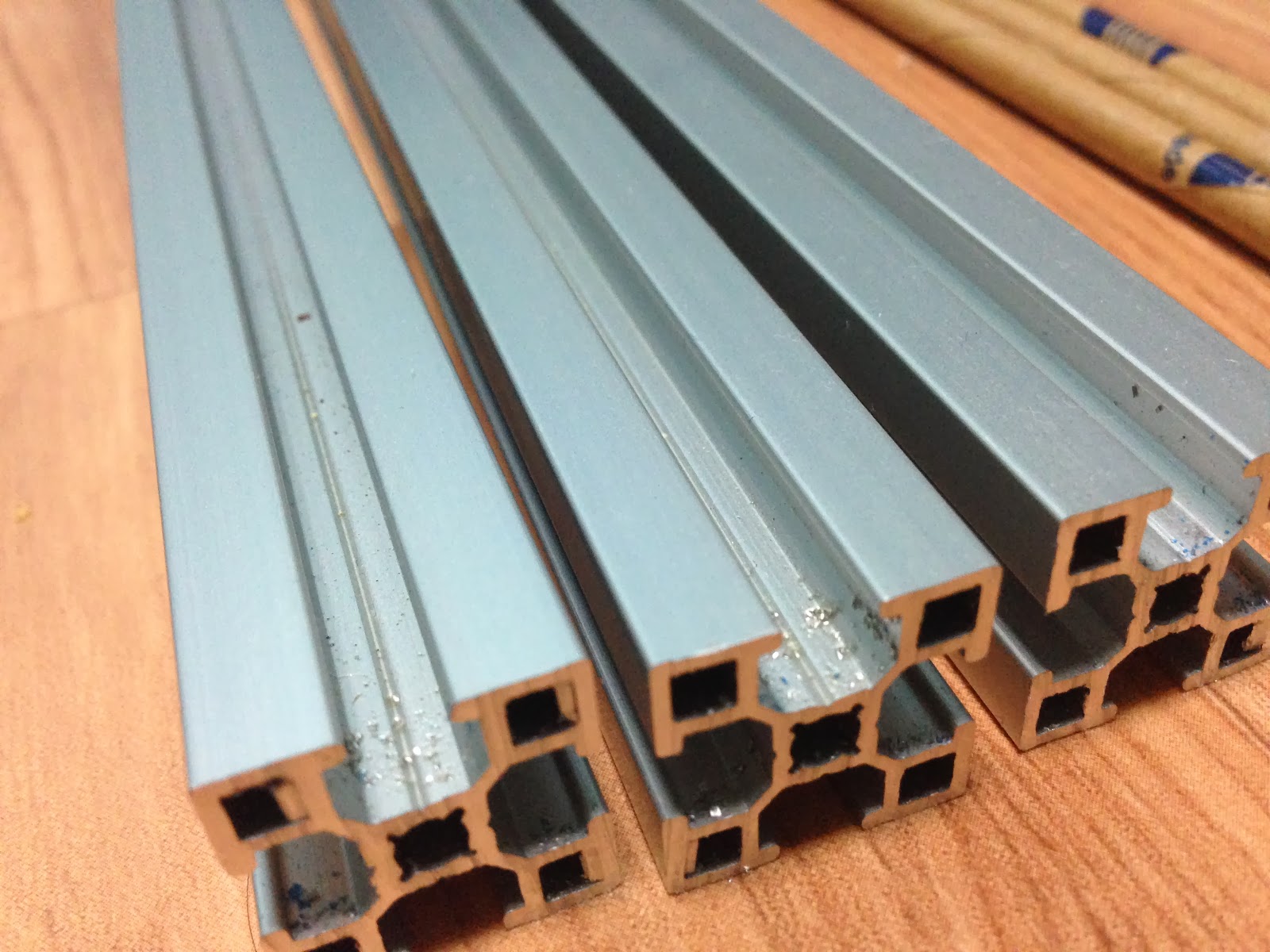
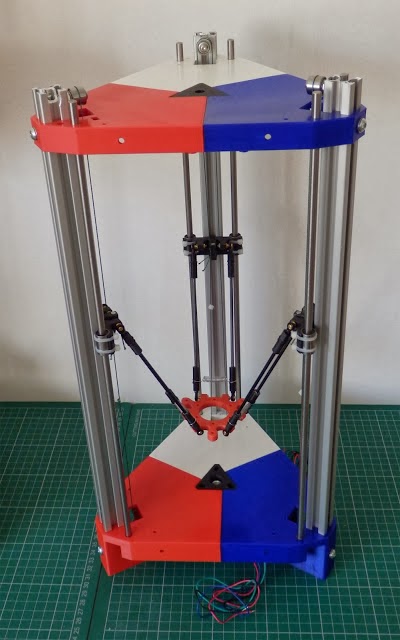
2. 카본 로드
엘레파츠에서 주문한 카본 로드입니다.
주문은 이곳에서 할 수 있습니다.
카본 로드는 금요일 오후에 도착했습니다.
지름 3mm, 길이 1m의 가늘고 긴 물건이라 어떻게 배송될지 궁금했는데, 아래 사진과 같이 지관에 넣어진 상태로 배송되었습니다.

<카본 로드가 배송된 상태>
카본 로드는 말 그대로 탄소섬유 복합재로 이루어진 봉입니다.
3D 프린터에서는 델타봇의 로드에 사용됩니다.
델타봇의 생명은 빠른 속도입니다. 이를 구현하기 위해서는 구동 부위가 최대한 가벼워야 합니다.
이를 위해 단단하고 가벼운 카본 로드를 사용하는 것입니다.

<카본 로드>
3. RC용 볼엔드
마지막으로, RC마을에서 주문한 볼엔드와 핀볼, 콘와셔입니다.
델타봇은 구조상 볼 조인트를 사용합니다.
<델타봇의 구조 (출처 링크)>

<델타봇의 볼 조인트 사용 모습 (출처 링크)>

<Rostock의 유니버셜 조인트 (출처 링크)>
위 사진과 같이, rostock 등 일부 프린터들은 유니버셜 조인트 형태로 이 기능을 구현하기도 합니다. 하지만 이 방식은 질량이 커지고, 유격(작동 부위의 흔들림)이 커서 정밀도가 떨어집니다. 그래서 저는 RC용 볼엔드를 사용하기로 했습니다.
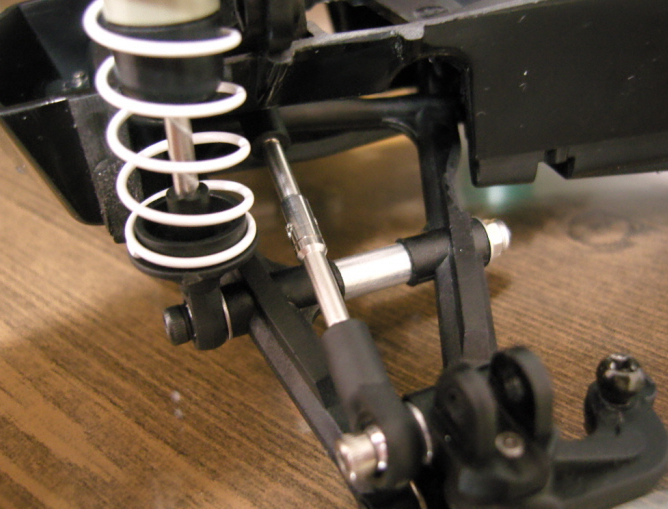
<RC카에서의 볼 조인트 (출처 링크)>
RC카에선 위 사진과 같이 스티어링이나 서스펜션에 볼 조인트를 사용합니다.
이를 위해 볼엔드라는 플라스틱 부품과 구멍이 뚫린 금속 볼로 볼 조인트를 구현합니다.
저는 이전에 RC카를 가지고 놀았던 경력(?)을 살려, 볼엔드를 3D 프린터에 적용했습니다.

<RC 마을에서 주문한 물건들>
XRAY는 슬로바키아의 RC카 제조사입니다.
이 회사의 제품은 금속 부품과 플라스틱 부품이 미친 정밀도를 자랑합니다.
심지어, 서펜트라는 회사에 금속 부품을 납품하거나, 공구를 제작해 판매할 정도입니다.
특히, XRAY사의 볼엔드는 매우 부드럽고 유격이 적기로 유명합니다.
그래서 저는 비싼 가격에도 불구하고 XRAY사의 볼엔드를 구입했습니다.
이 외에도 아카데미 볼과 알루미늄 콘와셔, 접시머리 볼트를 조합해

<볼 조인트>
이와 같은 형태로 사용할 계획입니다, 이렇게 하면 상하좌우 운동 모두 걸림 없이 사용 가능합니다.
이제 printed parts와 노즐만 준비하면 모든 재료가 준비됩니다.
역시, 한번 프린터를 제작해 보니 두 번째 제작은 더 수월하게 제작이 가능한 것 같습니다.