본격적인 제작은 Printed parts가 준비되어야 하는데, 아직 출력중이기에 이들이 필요 없는 로드부터 조립합니다.
로드의 길이는 볼조인트 중심부터 반대편 볼조인트 중심까지 150mm +- 10mm이면 됩니다.(약간의 길이 차이는 이후에 펌웨어 세팅에서 조절합니다.) 저는 가장 일반적인 150mm로 로드를 만들었습니다.
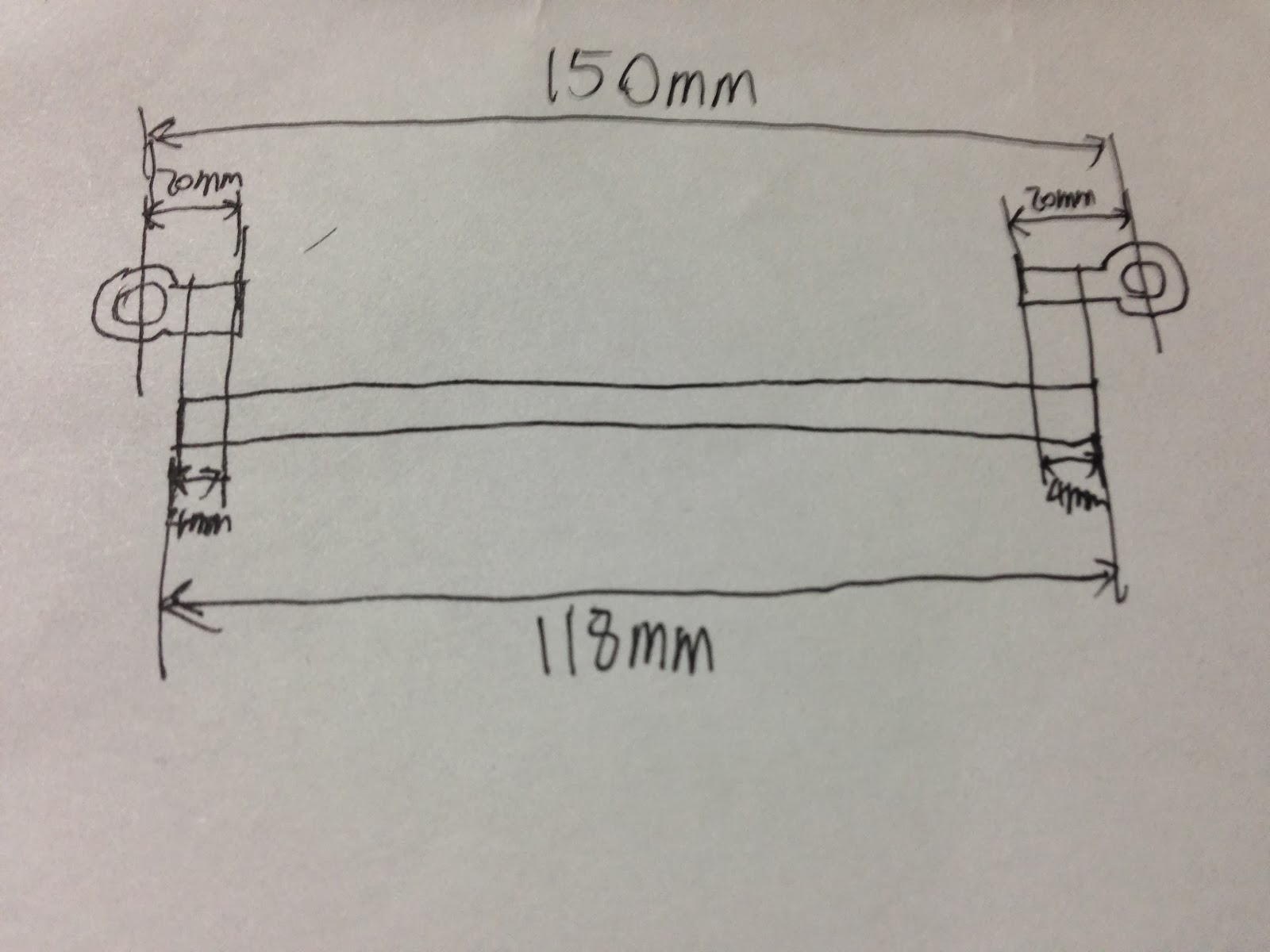
<카본 로드 절단 길이 결정>
버니어 캘리퍼스로 볼 조인트의 길이와 카본 로드가 들어가는 길이를 측정해 카본 로드의 길이를 118mm로 결정하고, 절단했습니다.
카본 가루는 1급 발암 물질입니다. 흡입하지 말고 피부에 닿지 않게 주의하세요.
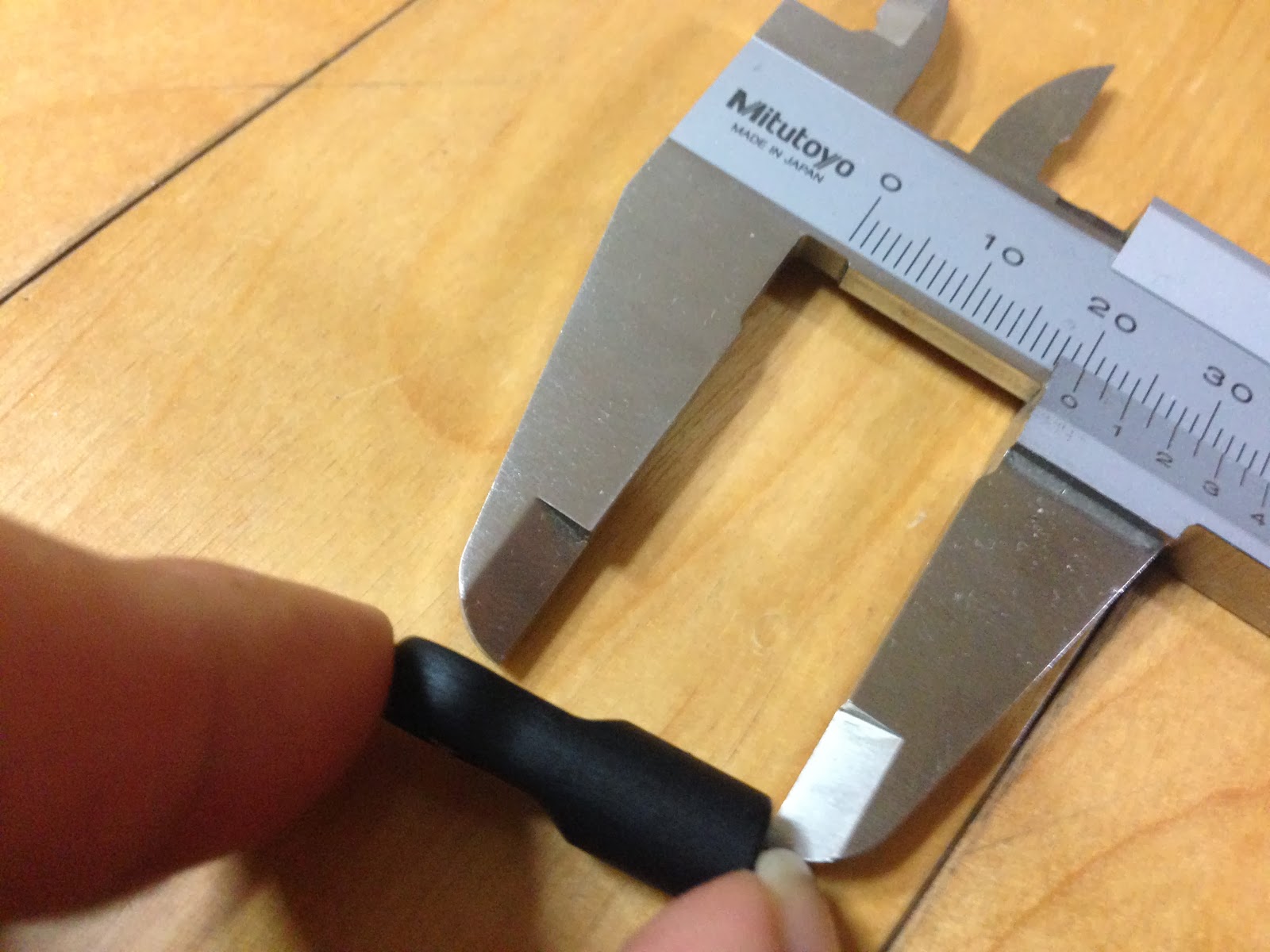
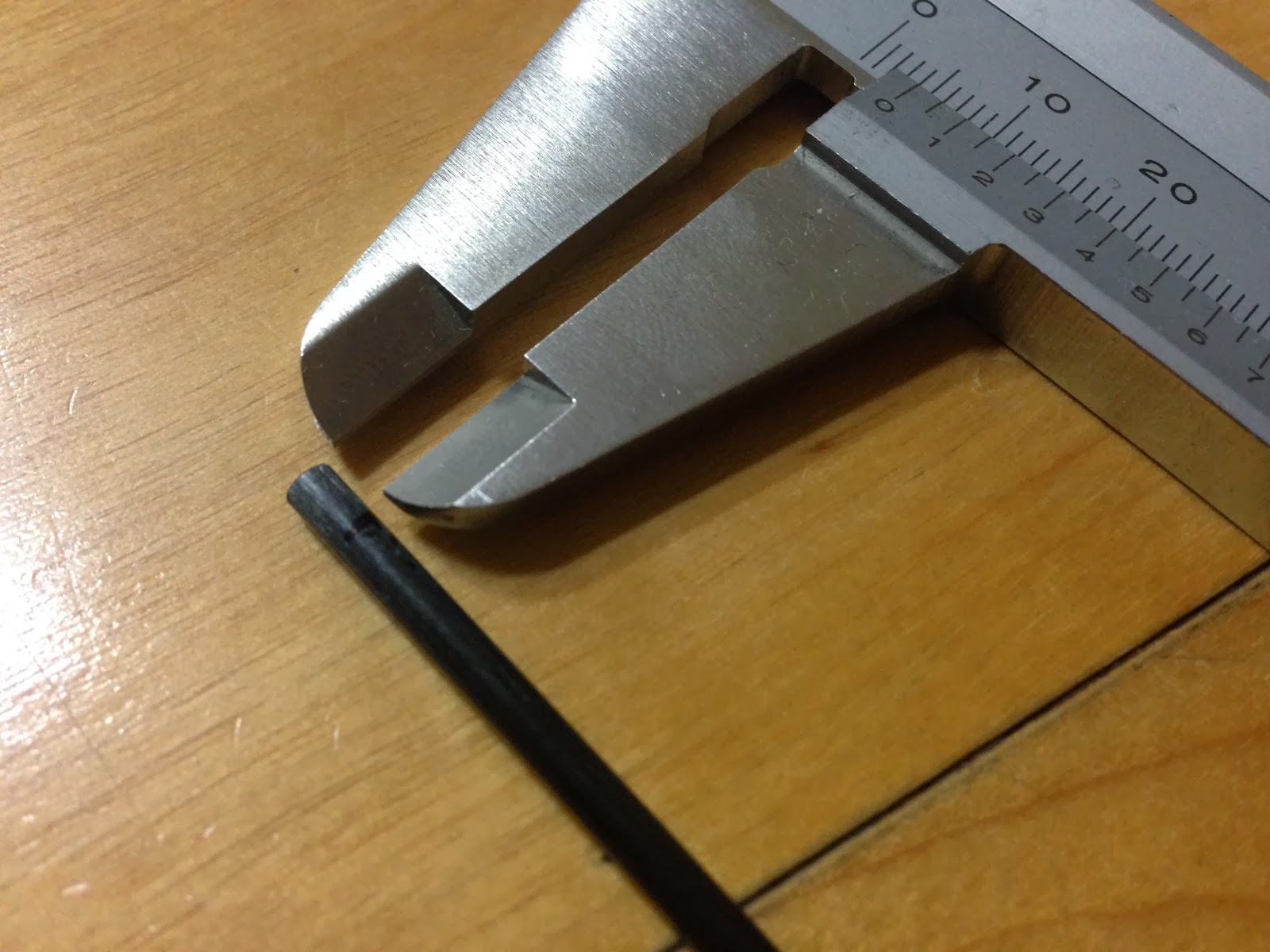
<길이 측정>
하지만, 그 전에 준비할 일이 있습니다.
이 볼조인트, 즉 RC용 볼엔드는 m3 볼트가 연결될 것을 전제로 만들어졌습니다.
그렇기에 볼조인트의 구멍의 지름이 3mm보다 작습니다.
반면, 이 속에 들어가야 하는 카본 로드는 직경이 3mm죠.
그래서, 볼조인트의 구멍을 3mm로 넓혀주어야 합니다.

<구멍 넓히기>
방법은 간단합니다. 아카데미 핀바이스에 3mm 날을 물리고 손으로 돌려주면 구멍이 잘 넓혀집니다.

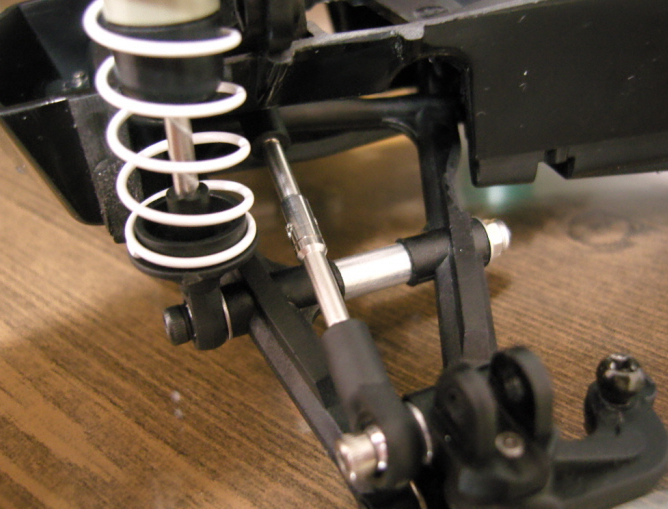
<카본 로드 연결>
이 구멍에 카본 로드를 넣어도 아주 잘 들어가죠.


<볼엔드에 볼 삽입>
그 다음, 볼엔드에 볼을 삽입합니다.
사진에서는 잘 보이도록 플라이어로 바로 볼과 볼엔드를 물고있지만, 실제로는 상처가 나지 않게 휴지로 감싸서 넣었습니다.

<6개 로드를 모두 제작>
위 과정을 6번 반복해 로드를 제작합니다.
그러면 완성! 이 아닙니다.
로드의 길이는 정확하지 않아도 되지만, 6개 로드의 길이는 전부 똑같아야 합니다.
저는 이를 맞추기 위해 지그를 만들었습니다.

<3D 프린터로 출력한 지그 부품>
스케치업으로 슥슥 그려 부품을 만든 뒤 STL 파일로 변환해 3D 프린터로 출력합니다.
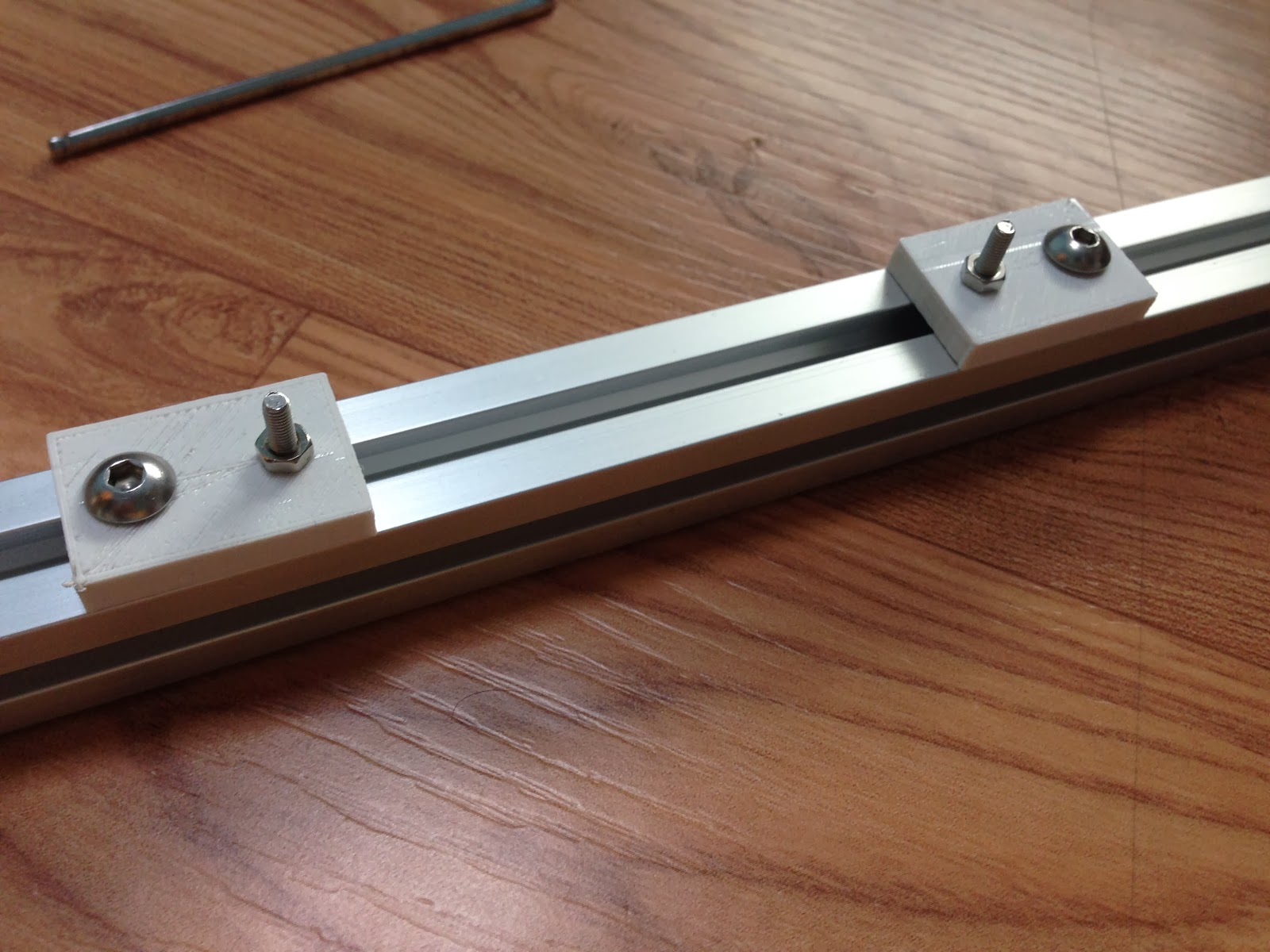
<지그 완성!>
이 부품을 M3 볼트와 M5 볼트를 이용해 이전에 구입한 알루미늄 프로파일에 부착하면 길이 조절이 가능한 지그 완성!

<로드의 길이 측정>
이 지그에 로드를 끼워보면서 로드의 길이가 똑같도록 조절합니다.

<완성된 지그>
그리고 길이가 변하지 않도록 볼엔드와 카본 로드 사이에 순간첩착제를 발라주면 로드 완성!
이번엔 정말로 완성입니다.
다음으로는, 연마봉을 절단해 보도록 하겠습니다.
연마봉의 정해진 길이는 없으나, 알루미늄 프로파일보다 50mm 짧게 자르면 됩니다.
만약 알루미늄 프로파일과 연마봉을 길게 한다면 출력 가능 높이가 높아지겠죠?
하지만, 이 길이가 너무 길어지면 진동이 심해지니 주의하시길 바랍니다.
저는 연마봉 역시 가장 일반적인 450mm로 절단했습니다.

<드레멜로 연마봉 절단하기>
그라인더가 있다면 좋겠지만, 저는 가난한 학생이기에 드레멜로 하나하나 절단했습니다.
이 연마봉은 직경이 6mm라 그나마 자를 만 하지만, 지난번 프루사 멘델을 만들때는 M8 SUS 전산볼트와 8파이 스텐 환봉을 잘라야 해서 정말 고역이었죠.

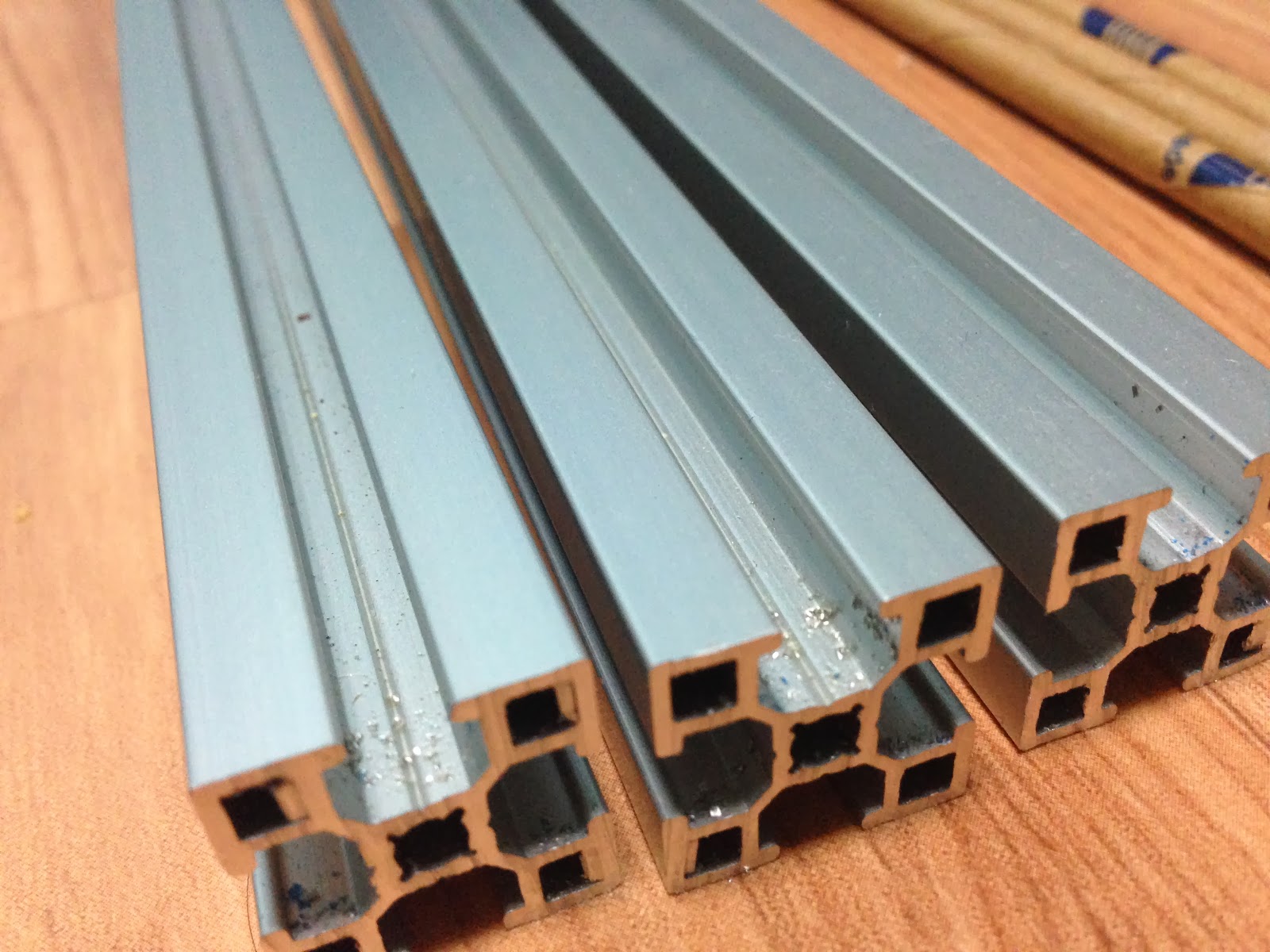
<연마봉과 알루미늄 프로파일>
여튼, 연마봉 6개를 모두 절단했습니다.
지난번보다 실력이 늘어서, 길이 차이가 거의 없게 자를 수 있었습니다.
다 자른 연마봉은 녹이 슬지 않도록 WD-40을 넉넉히 뿌려 신문지로 감싸서 보관합니다.
오늘, J Head Nozzle을 주문했습니다.
Printed parts도 다음주 정도면 출력이 완료될 것 같습니다.
그러면, 아마 2주 안으로 완성이 가능할 것 같습니다.
그때까지 잘 봐주세요! ㅋㅋ