사건의 발단
여느 날처럼 저는 공강시간에 미적을 공부하다 멘붕하고 아이패드로 페이스북을 뒤적거리고 있었습니다.
그러다, 놀라운 정보를 발견했습니다.
<사건의 발단이 된 페이스북 글>
좀 복잡한 경로(...)로 데니스 홍 교수님을 알게 되어 페이스북 팔로우를 해 놓고 있었는데, 이런 좋은 소식을 듣게 될 줄이야!
그리고 잠시 후 올라온 장소 공지

<해운대 앞 스타벅스에서 번개!>
제 학교와 해운대는 한참 떨어져 있어 편도로 50분 가량 걸리기 때문에 번개 참석에 대해 고민을 많이 했지만, 자주 오는 기회가 아니라고 생각하고 번개에 참석하기로 했습니다.
먼저 외출 신청과 자습시간 불참 신청을 하고, 평소 공학에 관심을 보이던 동기들과 선배님들께 연락을 돌렸습니다.
하지만 연락한 사람들은 다들 미적지근한 반응을 보였고, 어쩌다 도서관 앞 계단에서 만난 친구(사실 이 친구도 공학에 관심이 많습니다만, 연락하는걸 깜박 잊었습니다.)가 열광적인 반응을 보여 함께 가게 되었습니다.
사건의 전개
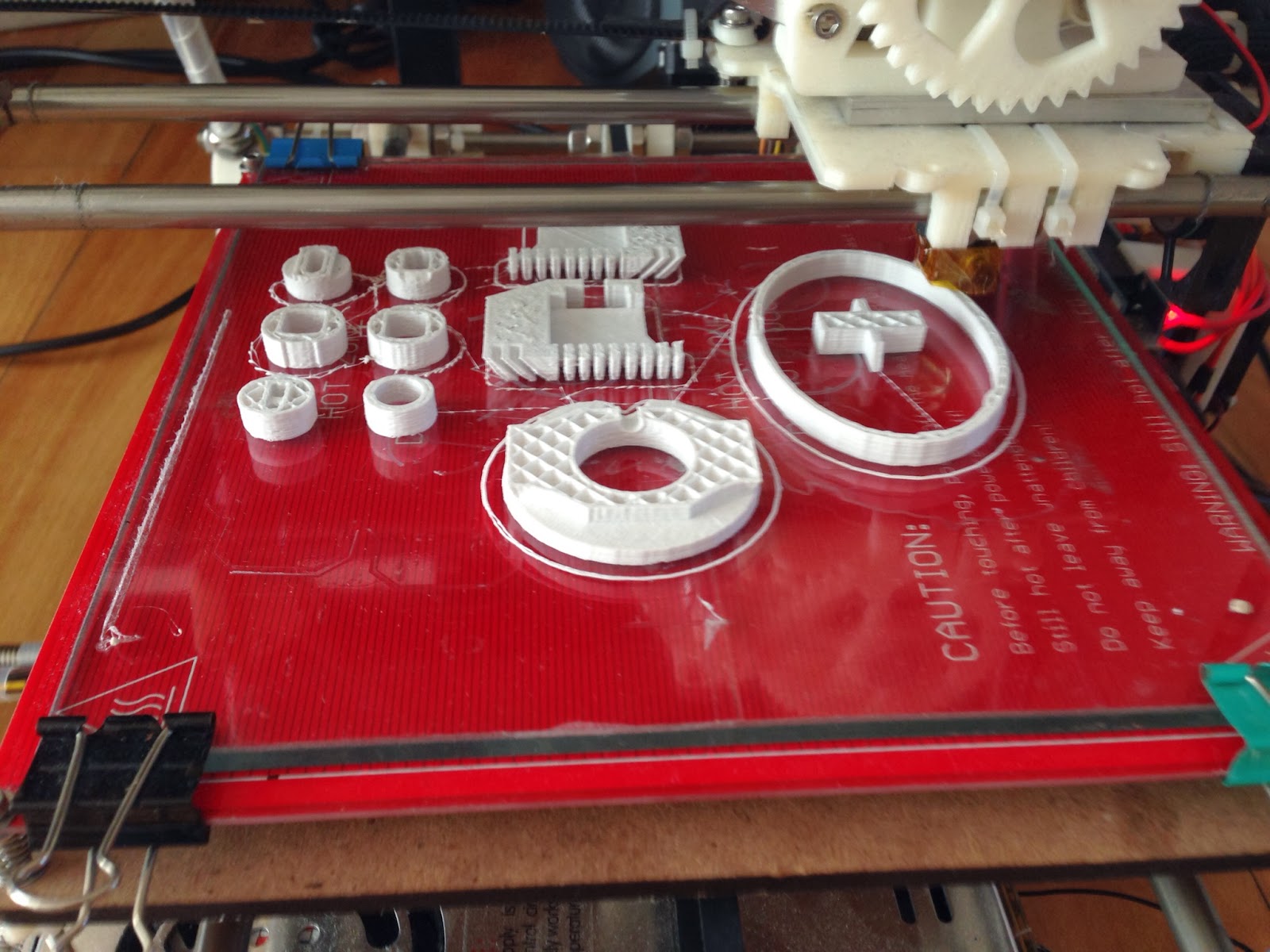
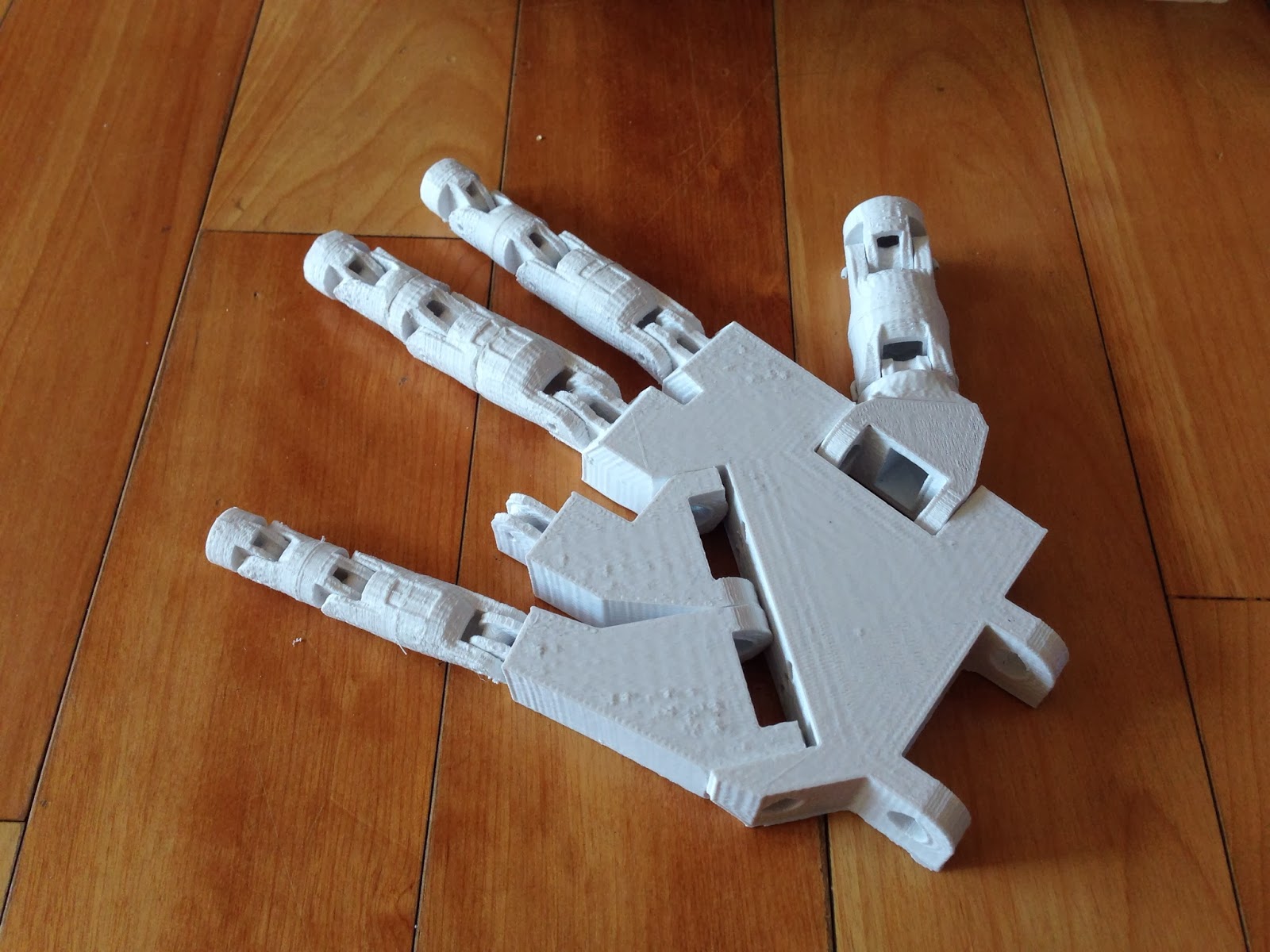
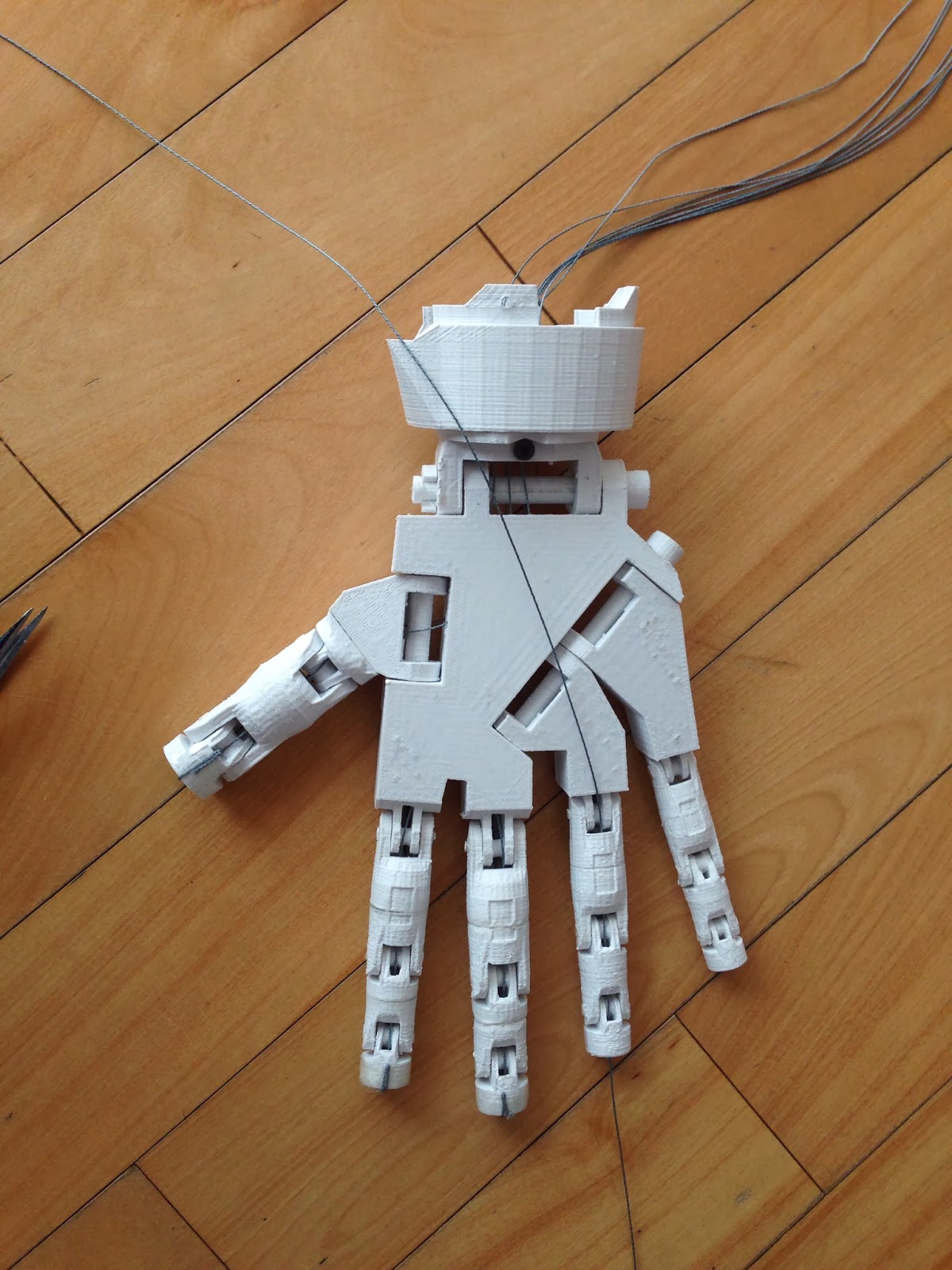
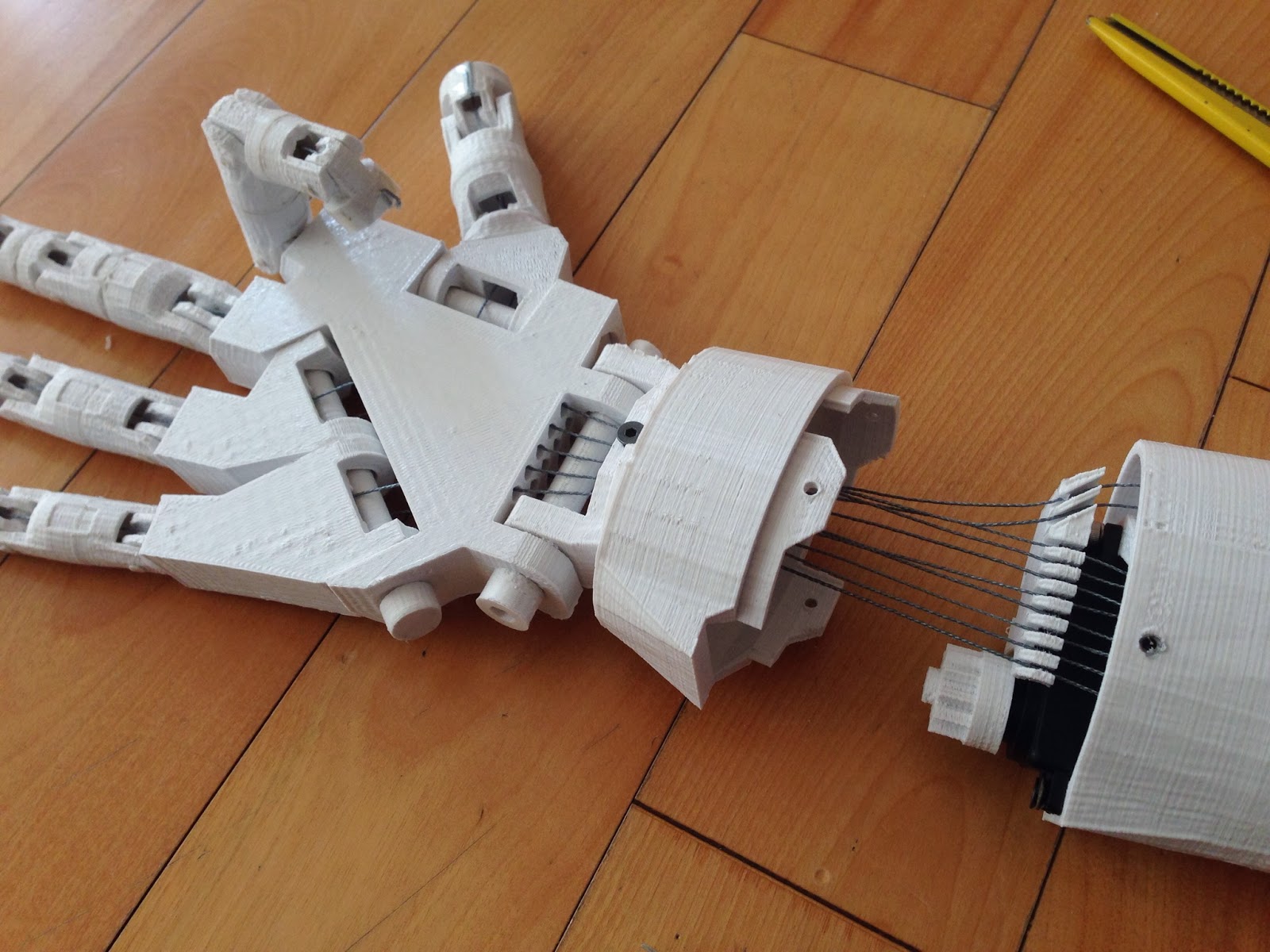
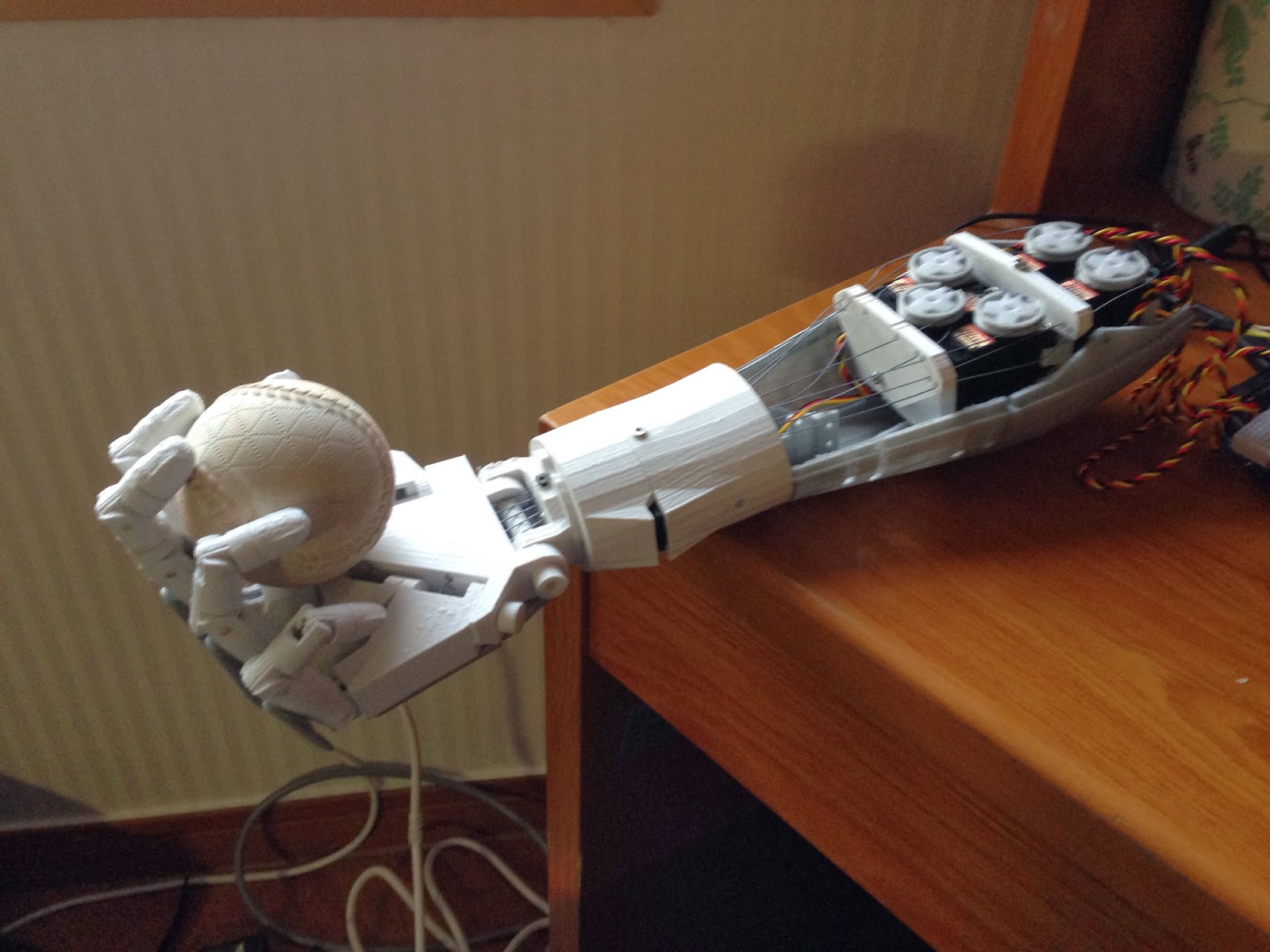
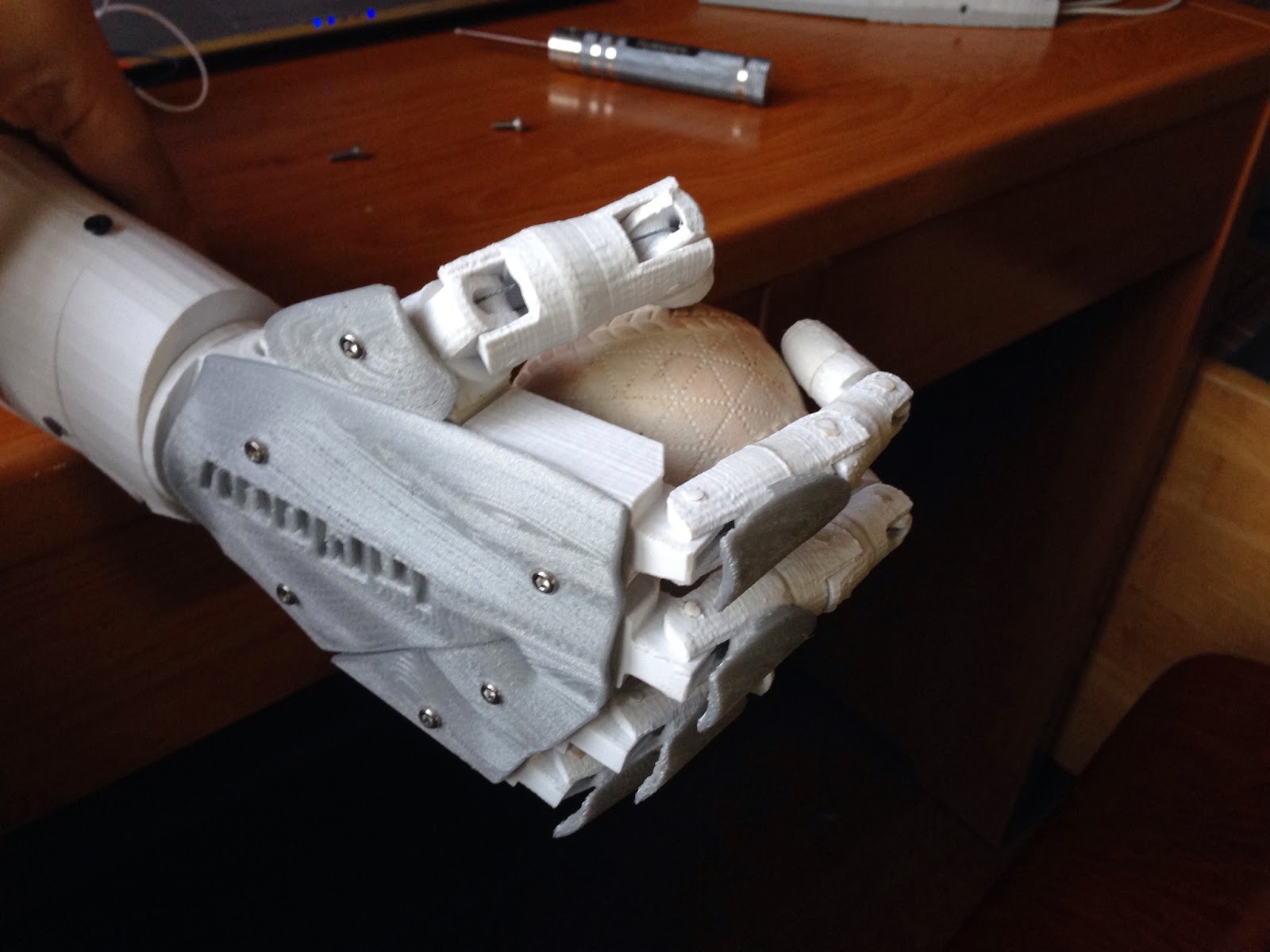
그렇게 한 명의 친구와 함께, 지난번에 만든 로봇팔을 들고

<해운대역 5번출구>
해운대역으로!

<해운대 해수욕장이 보이는 스타벅스>
스타벅스로!
이동했습니다.
예상보다 일찍 도착해서 테이블에서 친구와 노닥거리던 중, 번개 공지를 보고 오신 분들이 한두분씩 도착하기 시작했습니다.
심지어, 제 학교 선배님의 중학교 동창분도 만날 수 있었습니다.
잠시 후, 데니스 홍 교수님이 도착하셨고, 다들 테이블을 모아 이런저런 이야기를 나누기 시작했죠.

<번개 모습>
사진을 보면 아시겠지만, 굉장히 자유로운 분위기 속에서 번개가 진행되었습니다.
오신 분들도 초등학교 4학년부터 고등학생, 대학생, 직장인, 교수, 서울에서 오신 분, 스타트업 창업자 등 다양했습니다.
모인 후에는 돌아가면서 한 명씩 자기소개를 했습니다.
대화 중간에 오신 분들도 자기소개를 피하진 못했습니다 ㅋㅋ
처음 한 시간 정도는 로봇 개발에 대한 이야기도 나누고, 사회 환경이나 교수님의 강연 등에 대해 이야기를 나누다가, 그 다음에는 함께 사진도 찍고, 몇 명씩 모여서 대화를 나눴습니다.

<왼쪽에서부터 저, 데니스 홍 교수님, 함께 간 친구>
저도 물론 함께 사진을 찍었습니다.
이날 번개의 최연소 참석자인 로봇공학자 꿈나무 군은, 한국과학영재학교에 들어오는것이 목표라고 하더군요. 그래서 나름대로 학교 설명도 해 주었습니다.

<마지막에 찍은 단체사진>
굉장히 즐거운 시간이었고, 더 잇고 싶었지만 교수님도 밤에는 미국의 연구팀과 통신연구를 해야 하셨고, 저와 제 침구는 더 늦게 들어갔다간 기숙사에 들어갈 수 없기에 한시간 반 정도의 짧은 모임 후에 학교로 돌아왔습니다.
참, 물론 사인도 받았습니다.
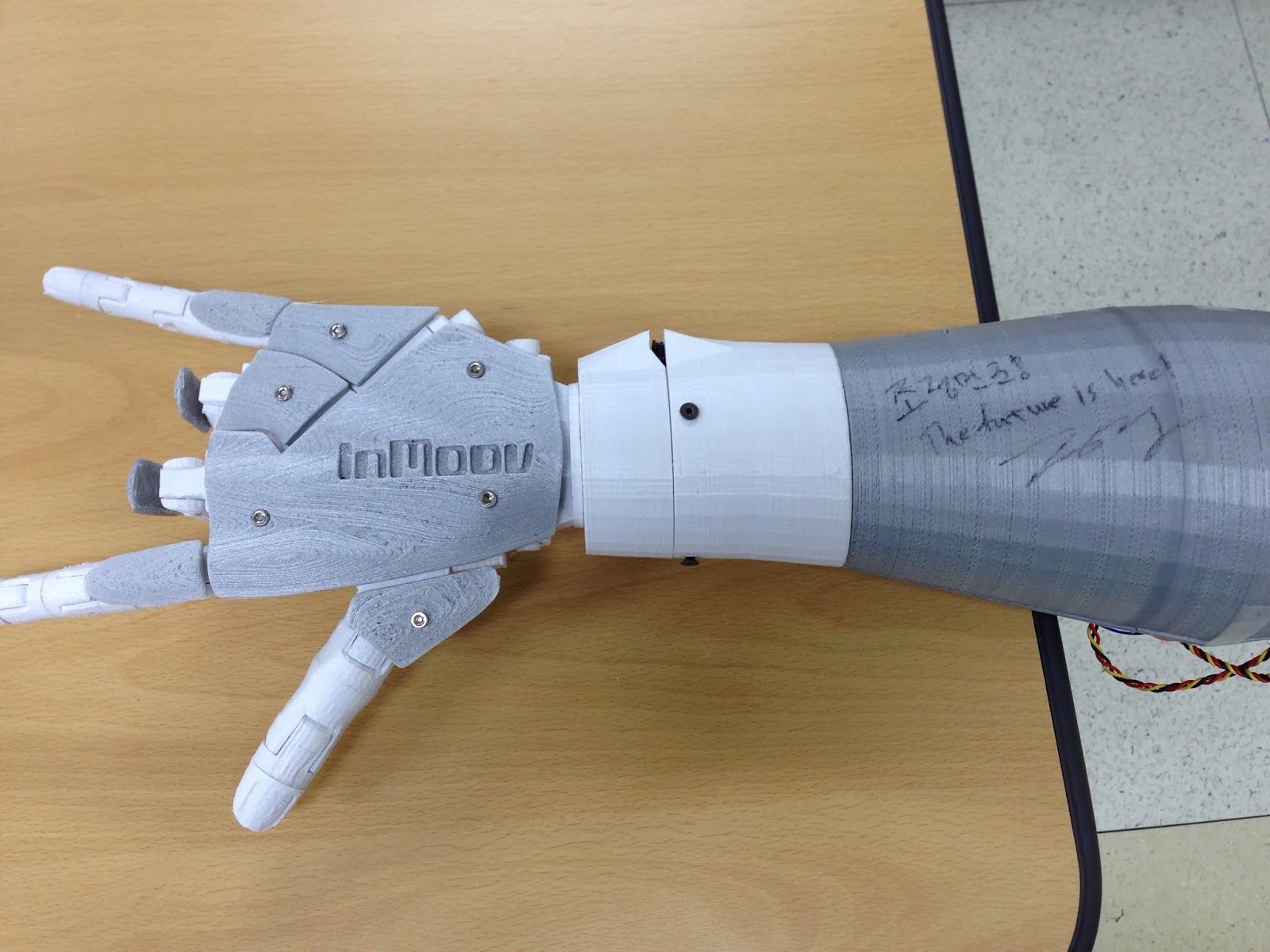
<로봇팔에 받은 사인>
교수님 덕분에 좋은 분들을 많이 만날 수 있어서 좋았습니다.
상우형!
성균관대학교 기계과의 김백석님!
부산대학교 기계과 신입생 김정동님!
무역회사 다니시는 이지영님!
덕분에 정말 즐거웠습니다.
시간이 많았으면 다른 분들과도 친해질 수 있었을 텐데, 정말 아쉽습니다.
PS.
오늘 아침에 일어나서 페이스북 뉴스피드를 보니, 제가 쓰지 않은 글에 제 사진이 몇개 나와 있었습니다.


이렇게 될 줄 알았으면 옷이라도 잘 입고 가는건데, 아쉽네요 ㅋㅋ
혹시 번개 참석하신 분들중에 제 블로그 보시면, wakalics@gmail.com으로 이메일 보내주세요!
앞으로도 계속 교류하고 싶습니다.