Cheetah 33254 CNC Router
Discussion in 'CNC Mills/Routers' started by mike125, Feb 1, 2014.
Cheetah 33254 CNC Router
Discussion in 'CNC Mills/Routers' started by mike125, Feb 1, 2014.
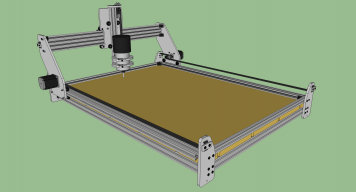
I hope to have a working prototype built soon.
Discussion in 'CNC Mills/Routers' started by mike125, Feb 1, 2014.
Discussion in 'CNC Mills/Routers' started by mike125, Feb 1, 2014.
I hope to have a working prototype built soon.