검색결과 리스트
글
트래킹(tracking)문제에서 그 기준 입력이 계단입력, 경사입력, 정현파입력인 경우에 대해 유용하게 적용될 수 있는 내부모델설계기법(Internal Model Design)에 대해 다뤄볼려고 합니다.
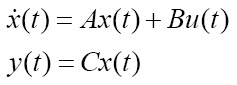
다루고자 하는 시스템은 위와 같이 표현할 수 있습니다.
다루고자 하는 시스템은 위와 같이 표현할 수 있습니다.
계단입력에 대해...
계단함수를 위와 같이 표현할 수 있으며
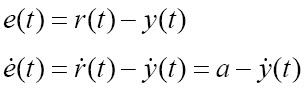
에러(error)를 기준입력인 계단함수와 출력의 차이라고 보면
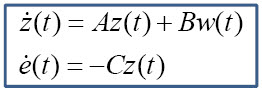
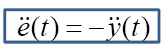
계단한수를 한번 미분한것은 '0'가 될 테니 에러의 미분을 위와 같이 표현할 수 있습니다. 이 때
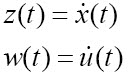
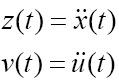
상태 z는 x의 미분으로 정의하고 입력의 미분을 w로 정의하면
와 같이 표현할 수 있습니다. 새로운 상태를 만들어낸것인데요.
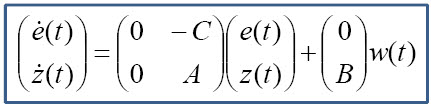
위와 같은 표현을 사용할 수 있겠지요...
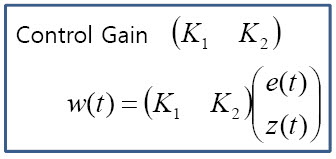
이때 제어 게인을 K라 하면 제어입력 w는 설정된 상태에 대해 위와 같이 표현될 것입니다.
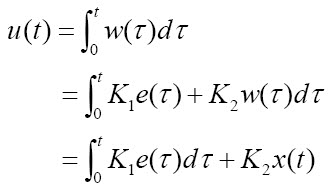
w를 한번 적분함으로서 원 시스템의 제어입력 u를 찾을 수 있을 것입니다.

일때,
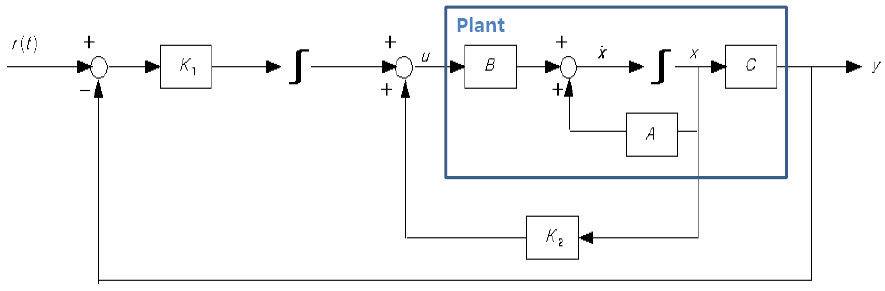
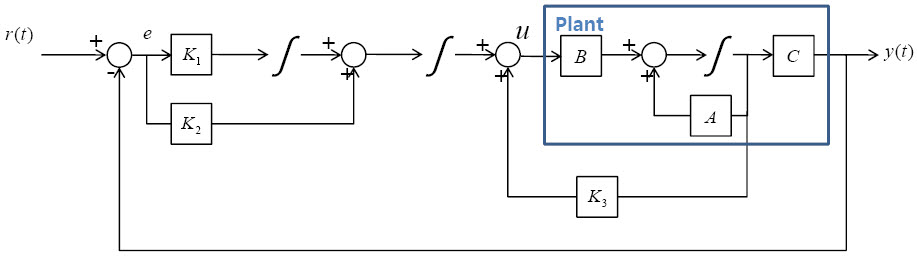
시스템을 블럭도로 표현한 것입니다.
경사입력에 대해...
경사함수는 위와 같은 모양일 것입니다. 이를 기준신호로 생각하면
에러와 그 한번 미분으로도 a가 없어지지 않음을 알 수 있네요. 다시
한번 더 미분하면 위와 같이 표현할 수 있음을 알 수 있습니다. 이때
위와 같이 새로운 상태를 잡고
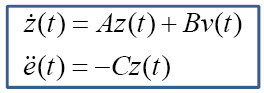
원 시스템을 위와 같이 표현할 수 있습니다.
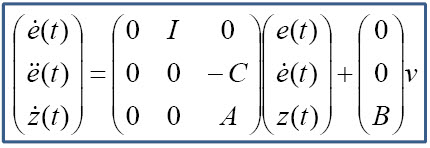
당연히 위의 상태행렬의 표현도 가능하겠지요.
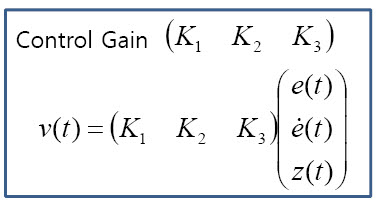
역시 제어게인을 K라 보고 제어입력 v를 정의하면

v를 두번 적분함으로 원 시스템의 제어입력인 u를 구할 수 있게 됩니다.

위에 제어입력에 대해
와 같이 표현할 수 있게 될 것입니다.
정형파 입력에 대해...
지금 다룰 기준신호는 위의 정현파 신호입니다. 여기서
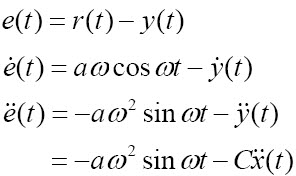
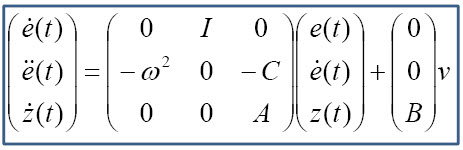
에러를 잡고 다시 두번더 미분하면 그 결과에 r이 보입니다. omega의 제곱이 곱해져 있네요. 그래서
이렇게 새로운 상태 z를 정의합니다.
그리고
위 식에서
새로운 입력 v와 상태 z를 이용하면
로 표현 가능하게 됩니다. 그러면
의 형태도 가능하겠지요.
본 자료는 Richard C. Dorf, Robert H. Bishop의
Modern Control Systems 제10판
을 참고한 자료입니다.
|
'The Robot > ControlTheory' 카테고리의 다른 글
| 밸런싱 로봇의 동역학 유도 (16) | 2010/01/03 |
|---|---|
| 제어입력의 크기를 가늠하기 위한 단순 진자 시뮬레이션 실험 (0) | 2009/11/30 |
| Cart Pendulum의 동역학 유도 (20) | 2009/11/06 |
| 내부모델설계기법 Internal Model Design (2) | 2009/10/07 |
| T-S 퍼지를 이용한 쿼드콥터 제어 (14) | 2009/07/23 |
| T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 (0) | 2009/07/20 |
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009/07/20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (10) | 2009/05/31 |
설정
트랙백
http://pinkwink.kr/trackback/186


필기해가면서 열심히 공부해야겠는데요... ^^
사실 저도 블로그에다가 필기하는 중인겁니다.. ㅋㅋㅋ^^