검색결과 리스트
글
얼마전에 NT-ARSv1이라고 하는 아주 예전에 개발했던 모듈의 데이터를 아두이노로 받아보는 것을 이야기했었습니다.[바로가기] 당시에는 그냥 ARS의 데이터가 4개의 값을 한 세트로 전송을 하니까 그걸 각각 숫자로 된 변수로 받는 아주 단순한 예제를 보였습니다. 특히 아두이노의 loop()함수를 반복문으로 그대로 사용하다보니 약간의 혼선이 있을 수도 있고, 또 아두이노의 String 클래스에 대해서도 살짝 이야기할겸, 이번에는 아두이노의 String 클래스를 이용해서 NT-ARSv1의 데이터를 받아보는 예제를 다뤄볼까 합니다.
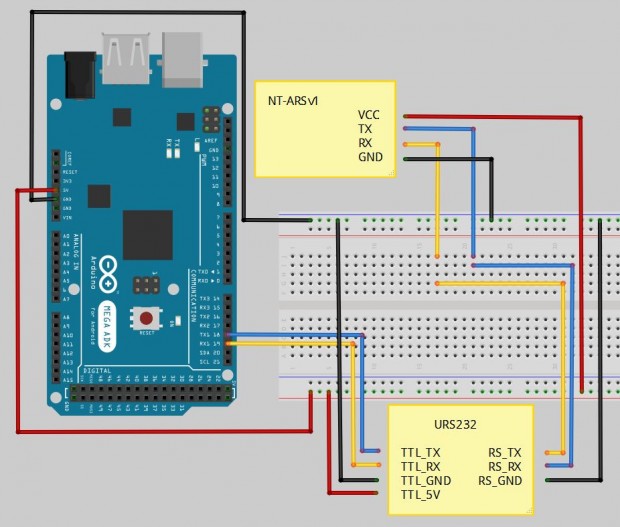
일단, 하드웨어적인 연결은 [바로가기]와 동일합니다. Arduino ADK MEGA와 적절한 UART to RS232 컨버터를 사용하여 NT-ARSv1과 연결했습니다. 그건 동일하니 [바로가기]를 참조해 주시고요. 그래도 글이 글이니 연결도 하나는 그대로 사용하죠^^
이번에는 처음 이야기한것 처럼 몇몇개의 함수로 구현할 겁니다. 먼저 보여드릴 예제는 getARSresultAtOnce() 함수입니다.
String getARSresultAtOnece() {
String outputValuesOfARS = "";
Serial1.print("<CAO>");
delay(2);
while (Serial1.available()) {
char incomingChar = Serial1.read();
outputValuesOfARS += incomingChar;
}
return outputValuesOfARS;
}
이 함수는 NT-ARSv1의 데이터를 String의 형태로 저장하는 것이 목적입니다. 여러가지 형태로 다양하게 사용하실려면 이 함수만 사용하신 다음 간편하게 응용하시면 될듯합니다. 주의하실것은 반환되는 형태가 String이라는 것입니다.^^. 그리고 함수에도 나와있지만 <CAO> 명령을 사용해서 한번만 데이터를 받습니다. 아두이노에서 다양한 응용을 하시는 경우 <CAH>처럼 일정 시간간격으로 계속 데이터를 받는 것보다는 <CAO> 명령을 사용하실 경우가 더 많다는 생각이 들었을 뿐입니다.^^. 그리고 6번행의 delay()함수는 <CAO> 명령을 하달한 다음 바로 시리얼 데이터를 읽도록 하면 데이터가 도착하기 전에 지나가버려서, 사용한겁니다. 물론 데이터가 실제로 들어올때까지 기다리라는 조건문을 사용해도 되었겠지만, 이런 종류의 예제를 배포할때 그렇게하면 또 데이터가 들어오지 않는 어떤 다른 이유가 있을때의 방어도 해야할듯해서 ... 그래서 그냥 이렇게 둡니다.^^.
그리고 8번부터 11번에서는 한 문자씩 들어오는 데이터를 하나의 String으로 합쳐둡니다. 여기서도 사실 에러에 대한 방어코드를 둘수도 있겠지만, 그냥 예제니까요. 일단 생각나는 몇몇 방어대책은 <와 >로 데이터는 쌓여있는지, 콤마(,)는 세개가 다 들어왔는지 등을 확인하면 데이터가 100% 잘 들어왔는지 아닌지 확인할 수 있을 겁니다.
그리고 getARSresultAtOnce()를 이용해서 NT-ARSv1이 출력하는 <Roll, Pitch, Roll_vel, Pitch_vel>이렇게 네 개의 데이터 중 사용자가 선택할 수 있는 함수를 별도로 두었습니다.
double getRollAngle() {
String outputValuesOfARS = getARSresultAtOnece();
int firstComma = outputValuesOfARS.indexOf(',');
String rollAngleST = outputValuesOfARS.substring(1, firstComma);
double rollAngle = rollAngleST.toInt() * 0.001;
return rollAngle;
}
그 중 위의 함수는 getRollAngle() 이름에서도 알 수 있듯이 Roll각도만 추출하는 겁니다. double형을 반환한다고 되어 있는 것처럼 반환되는 값은 라디안(Radian)단위입니다. indexOf()함수를 이용해서 첫 번째 콤마의 위치를 반환받은 다음, substring()함수를 이용해서 잘라내서 따로 저장을 한 것입니다. 그리고 NT-ARSv1은 라디안 단위를 1000을 곱해서 출력하므로, 다시 1000을 나눠줘서 깔끔하게 라디안단위로 받아 볼 수 있게 한 것입니다.
// 2013.09.16 NTRexLAB.
// NT-ARSv1 example
// ARDUINO MEGA ADK. ARDUINO IDE 1.0.5
void setup() {
// initialize serial and serial1 communications at 115200 bps:
Serial.begin(115200);
Serial1.begin(115200);
}
void loop() {
double rad2degree = 180/3.141592;
double rollAngle = getRollAngle();
Serial.print(" Roll Angle is ");
Serial.print(rollAngle*rad2degree);
Serial.println(" degree.");
double pitchAngle = getPitchAngle();
Serial.print(" Pitch Angle is ");
Serial.print(pitchAngle*rad2degree);
Serial.println(" degree.");
double rollAngVel = getRollAngVel();
Serial.print(" Roll Angular velocity is ");
Serial.print(rollAngVel*rad2degree);
Serial.println(" degree/second.");
double pitchAngVel = getPitchAngVel();
Serial.print(" Pitch Angular velocity is ");
Serial.print(pitchAngVel*rad2degree);
Serial.println(" degree/second.");
while(true);
}
// Getting output data of NT-ARSv1 after "<CAO>" commander.
// The resulting data is stored in the form of a String.
String getARSresultAtOnece() {
String outputValuesOfARS = "";
Serial1.print("<CAO>");
delay(2);
while (Serial1.available()) {
char incomingChar = Serial1.read();
outputValuesOfARS += incomingChar;
}
return outputValuesOfARS;
}
double getRollAngle() {
String outputValuesOfARS = getARSresultAtOnece();
int firstComma = outputValuesOfARS.indexOf(',');
String rollAngleST = outputValuesOfARS.substring(1, firstComma);
double rollAngle = rollAngleST.toInt() * 0.001;
return rollAngle;
}
double getPitchAngle() {
String outputValuesOfARS = getARSresultAtOnece();
int firstComma = outputValuesOfARS.indexOf(',');
int secondComma = outputValuesOfARS.indexOf(',', firstComma+1);
String pithchAngleST = outputValuesOfARS.substring(firstComma+1, secondComma);
double pitchAngle = pithchAngleST.toInt() * 0.001;
return pitchAngle;
}
double getRollAngVel() {
String outputValuesOfARS = getARSresultAtOnece();
int firstComma = outputValuesOfARS.indexOf(',');
int secondComma = outputValuesOfARS.indexOf(',', firstComma+1);
int thirdComma = outputValuesOfARS.indexOf(',', secondComma+1);
String rollAngVelST = outputValuesOfARS.substring(secondComma+1, thirdComma);
double rollAngVel = rollAngVelST.toInt() * 0.001;
return rollAngVel;
}
double getPitchAngVel() {
String outputValuesOfARS = getARSresultAtOnece();
int firstComma = outputValuesOfARS.indexOf(',');
int secondComma = outputValuesOfARS.indexOf(',', firstComma+1);
int thirdComma = outputValuesOfARS.indexOf(',', secondComma+1);
String pithchAngVelST = outputValuesOfARS.substring(thirdComma+1, outputValuesOfARS.length() - 3);
double pithchAngVel = pithchAngVelST.toInt() * 0.001;
return pithchAngVel;
}
위 코드가 전체 코드입니다. 딱히 뭐 별다를 건 없습니다만, 살짝 함수로 만들었고, 좀 있어보이고 String 클래스를 쓰는 척(^^)했습니다. 그러나 저야 아두이노의 String 클래스도 한번 들여다 볼겸 이렇게 한거고, 실제로는 [바로가기]에서 한 것 처럼 간단히 구현해보는게 더 쉬울거라는 생각도 듭니다. 단, loop()문안에 있는 걸 별도로 반복문을 사용하셔서 구현하셔야 하지만 말이죠.
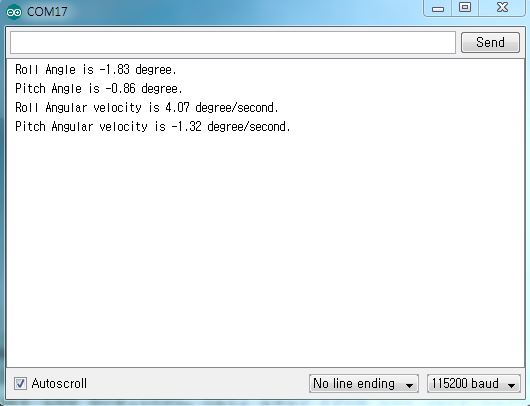
그렇게 구현된 것을 실행한 화면입니다. 함수로 예제를 꾸몄으니 이제 사용하시면 되지 않을까 합니다. 아 그리고, 혹시나 흉보실 까바 구구절절한 변명하나 하면, 보통 사용하는 분들은 Pitch, 혹은 Roll 이 두개의 각도중 하나만 사용하시는 경우가 더 많습니다. 그래서 4개의 값을 각 각 하나씩 함수로 만든 것입니다. 그리고, 그냥 저도 최근에 꽤나 흥미를 느끼는 이 아두이노에 대해 살짝 저 공부하고 있어요~~라고 티도 팍팍 내고 싶었구요^^. 아무튼 추석이네요. 다들 추석 잘 보내세요^^ (아참 이 글은 ntrexgo.com에도 약간 단어의 선택은 다르지만, 동시에 기고되었습니다.^^)
'The Robot > HardwarePart' 카테고리의 다른 글
| 로보링크의 Rokit Hunoi for Arduino 개봉기 (10) | 2014/05/08 |
|---|---|
| Herringbone gear 헤링본 기어 - 3D 프린터로 출력하기 딱 좋은 예제 (30) | 2014/01/27 |
| 아두이노의 STRING 클래스를 이용하여 NT-ARSv1의 데이터 받아보기 (12) | 2013/09/17 |
| 아두이노(Arduino)에서 NT-ARSv1의 데이터를 받아보자 (14) | 2013/08/30 |
| 아두이노(Arduino)에서 로터리 엔코더 해석하기 (8) | 2013/08/28 |
| 개발자에게 혁신을 줄까? BeagleBoard 비글보드 소개 (18) | 2013/06/10 |
| 2채널 핸디형 오실로스코프 추천. OWON HDS1022M-N (20) | 2013/03/06 |
| LinuxCNC/EMC2를 이용하여 스태핑모터 돌리기 설정^^ (20) | 2012/09/05 |
설정
트랙백


다녀간답니다 ^^
즐거운 추석을 보내세요~
네 편안한 추석이었습니다.^^
추석 잘보내고 계시죠... ㅋㅋ 열심히 공부하시면서 성취감도 얻으면 더 좋지요
네 감사합니다.^^ 좋은 연휴 되세요^^
덕분에 잘 보고 갑니다~
즐건 하루 되시길 바래요~
넵~ 감사합니다.^^
잠시 인사드리러 왓답니다^^
편안한밤 되시길 바래요`
ㅎㅎ 네~ 감사합니다.^^
좋은정보 감사합니다
좋은 저녁되세용^^
새로운 한주 잘 보내시기 바랍니다
그러게요. 이번주는 휴일이 없네요^^