You are not logged in.
- Topics: Active | Unanswered
#1 2016-02-26 09:26:09
- Wes Kim
- Member
- Registered: 2016-02-26
- Posts: 2
Z-axis doesn't work (it works on manual)
Thank you for the releases nanodlp. I am really on it.
Now I have two problems. sequence and Z-axis.
Z-axis doesn't work after I start printing.
I use Ramps on Arduino mega to control the motors. I don't think it wiring or any electronic problem. It works pretty well on manual.
I though I probably forgot to set something about motor. I couldn't find any clues even though I looked up Setup menu and Printer profiles.
I guess I might be able to correct sequence after making Z-axis move.
If somebody know or experienced same problem, give me some advice.
Thanks for reading.
Last edited by Wes Kim (2016-02-29 04:34:20)
Offline
#2 2016-02-26 10:59:15
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
If you can, please share file /home/pi/printer/db/machine.json, if not please share screenshot of you setup page.
My guess is its something to do with your gcodes, most probably termination of command lines.
Offline
#3 2016-02-27 05:16:31
- Wes Kim
- Member
- Registered: 2016-02-26
- Posts: 2
Re: Z-axis doesn't work (it works on manual)
G99 and G100 are projector on/off commends. They send binary code to projector from Arduino.
I wanted to turn on projector 5 minutes earlier before printing starts and so I put the commend(projector on) on Gcode-start of print insted of using projector turn on/off commend.
I think I need to handle this problem too after Z-axis motor moves.
Last edited by Wes Kim (2016-02-27 06:49:44)
Offline
#4 2016-02-27 07:58:12
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
nanodlp itself also turn on projector as soon as you start printing, so any delay in gcode-start will help it to reach 5min target.
Your line terminations and ramp connectivity settings look fine. If the manual movement works in z-axis calibration, command like this "G1 Z0.1" would work in gcode boxes too.
Have you tried your commands in terminal tab? If sending commands through terminal working fine, it has something to do with your gcodes which I do not have much experience with.
Offline
#5 2016-03-17 03:07:32
- Rastati
- Member
- Registered: 2016-03-03
- Posts: 11
Re: Z-axis doesn't work (it works on manual)
Hi, I am currently trying to make my stepper work with the DRV8825. Just to be sure, the color code of the stepper is :
Black -->B2
Green -->B1
Red-->A1
Blue-->A2
Right?
Also, I dont quite understand how to use the Speed and Actuator/Motor settings in the Setup.
Suppose I want to use full steps and my motor has 1.8 degrees step angle and 200 steps per revolution
in the setup I would put these values :
Motor Step Angle : (1,8) Microsteps: (200)
If I want to change to use 1/16 steps, I would use these values?
Motor Step Angle : (0.11) Microsteps : (3200)?
Also, if I understand well, the pulse buttons in the calibrate section are independent of the Speed settings in the setup?
Offline
#6 2016-03-17 07:27:51
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
Hi,
Take a look at http://www.nanodlp.com/images/schematic.png for DRV8825 wiring.
{kind=link}
Motor angle field: 1.8
If you are using 1/16 micro steps give 16 as micro step value.
About calibration page, for gpio direct control it will consider max-speed setting.
Offline
#7 2016-07-03 17:41:30
- dark_storm
- Member
- Registered: 2016-07-03
- Posts: 1
Re: Z-axis doesn't work (it works on manual)
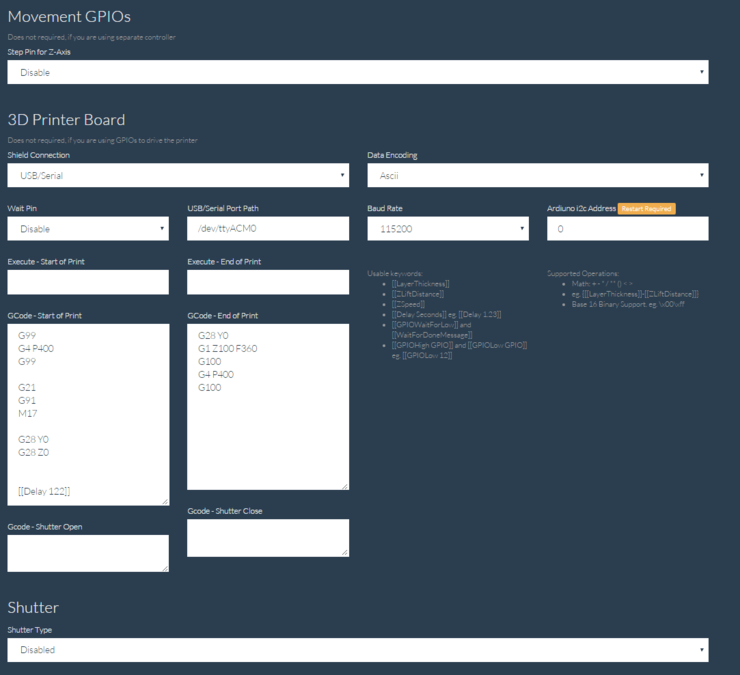
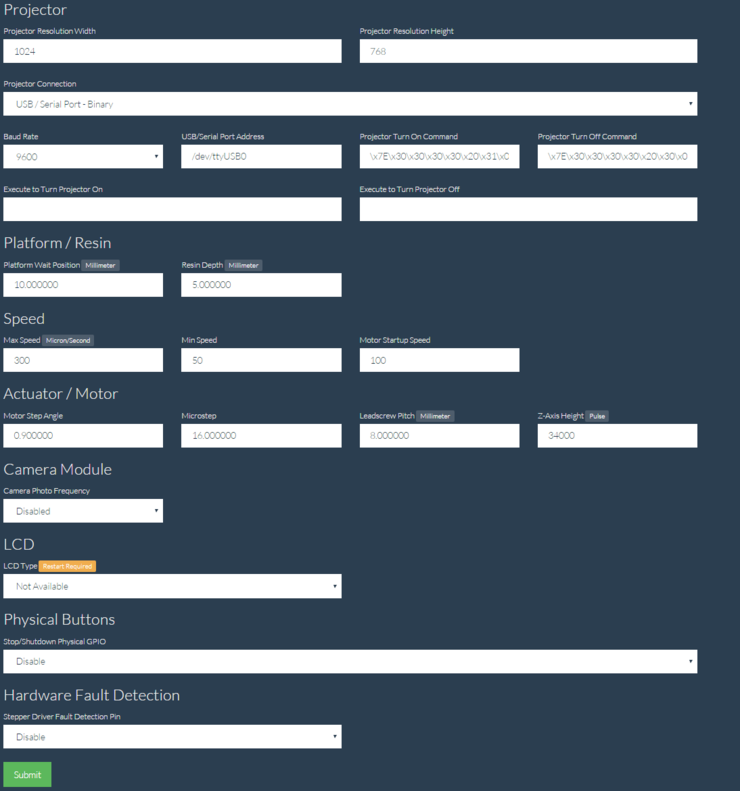
Hello.
I'm testing nanodlp with a mUVe 1.1 DLP and have the same problem. On manual the motors move. When it starts printing, the plat is moved to home but doesn't move anymore. In the images are my current configuration.. Thanks
Offline
#8 2016-07-04 03:30:54
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
It probably something to do with wiring or gcodes, which you could get better support on muve forum.
Offline
#9 2017-04-10 11:12:10
- ldanut
- Member
- Registered: 2016-11-17
- Posts: 1
Re: Z-axis doesn't work (it works on manual)
I have a similar problem with grbl 0.9. If I run in manual mode G1 Z10 doesn't work but if I use G1 Z10 F200 it works. I think grbl 0.9 makes mandatory to specify the feed rate.
Offline
#10 2017-05-02 21:26:24
- NECOX
- Member
- Registered: 2017-02-20
- Posts: 5
Re: Z-axis doesn't work (it works on manual)
Hi,
Is there any possibility to have some help about Z stepper control,
I can not access to step motor:
Debug 615 2017-05-02 19:00:02.876347 WiFi Status Monitoring
Warning 615 2017-05-02 19:00:02.876206 WIFI WIFI interface wlan0 detected
Notice 615 2017-05-02 19:00:02.773519 Terminal Terminal Reader Activated
Debug 615 2017-05-02 19:00:02.773441 Hardware Stepper motor enabled
Debug 615 2017-05-02 19:00:02.77337 Shutter Shutter Close
Error 615 2017-05-02 19:00:02.756988 SLAVE Serial port could not be activated open /dev/ttyACM0: no such file or directory
Notice 615 2017-05-02 19:00:02.756159 Hardware Initializing build # 1392 - generic
how can I open Steper motor ?
Offline
#11 2017-05-03 03:06:32
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
You need to correct RAMPS address.
Offline
#12 2017-05-03 08:00:31
- NECOX
- Member
- Registered: 2017-02-20
- Posts: 5
Re: Z-axis doesn't work (it works on manual)
Hi Shahin
Thanks for reply,
I am using your "Direct Control" board which is "https://www.nanodlp.com/download/schematic.png"
{kind=link}
But I can not get any reply from Direct Control board
Offline
#13 2017-05-03 20:07:51
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
You do not need to setup any RAMPS board if you are using direct control.
Just setup correct gpios
Offline
#14 2017-05-06 22:06:00
- NECOX
- Member
- Registered: 2017-02-20
- Posts: 5
Re: Z-axis doesn't work (it works on manual)
Thanks for reply Shahin,
Would you please give us more details about how to setup gpios for stepper ?
I am using DRV8825
Do we have to make any wire conection ?
Stepper driver is already connect with direct control system !
Offline
#15 2017-05-07 05:35:26
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
Only direction and pulse pins from DRV8825 require connection to RPi. Both pins on RPi side is customizable means you can choose any of valid pins pi and setup on nanodlp.
It is quite simple, there are some tutorials on how to drive stepper motors using rpi. You can follow those guides as wiring part is same.
Offline
#16 2017-05-12 20:57:14
- NECOX
- Member
- Registered: 2017-02-20
- Posts: 5
Re: Z-axis doesn't work (it works on manual)
How Can we setup DIR ENABLE pins for controling Step on nanodlp ?
Is there any possibility to share settings for this ?
Offline
#17 2017-05-13 09:47:12
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Z-axis doesn't work (it works on manual)
If you have stepper wired directly to nanodlp. Just choose pin on the setup page. No additional settings required.
Offline