검색결과 리스트
글
현재 이글의 내용은 잘못유도되었습니다. http://www.pinkwink.kr/342 를 바로 읽으시길 바랍니다.
어느날 문득... 저에게 트랙백이 하나 날라들어왔습니다.
[모델링] 리액션 휠을 이용한...??? 응?? 그래서 따라가 보았더니
저(PinkWink)에게 질문을 하신 것이더군요...ㅠㅠ 평상시엔 이렇게 풀어달라든지, 혹은 코드 어디가 잘못된 것인가?? 라는 형식의 질문은 대답을 잘 하지 않습니다. 이유는 저도 상당히 실력이 떨어지기 때문에 어디가 문제인지 확인하기 위해서는 너무 오랜시간을 고민해야하기 때문입니다. 딱 보고 여기가 잘못임... 이라고 말 할 수 있는 고수가 아직 되지 못했기 때문이지요...ㅠㅠ
그런데 이 경우는 시스템자체가 관심이 가더군요.. 그래서 대략 3시간동안 정리를 해보았습니다.ㅠㅠ
Reaction Wheel Pendulum 이라는 것이 정확한 용어인지는 잘 모르겠습니다. 또한, 다른 관련자료를 찾아보지 않아서 정확하게 개념을 잡았는지도 사실 잘 모르겠습니다. 그저 재미삼아 한번 유도해보겠습니다.
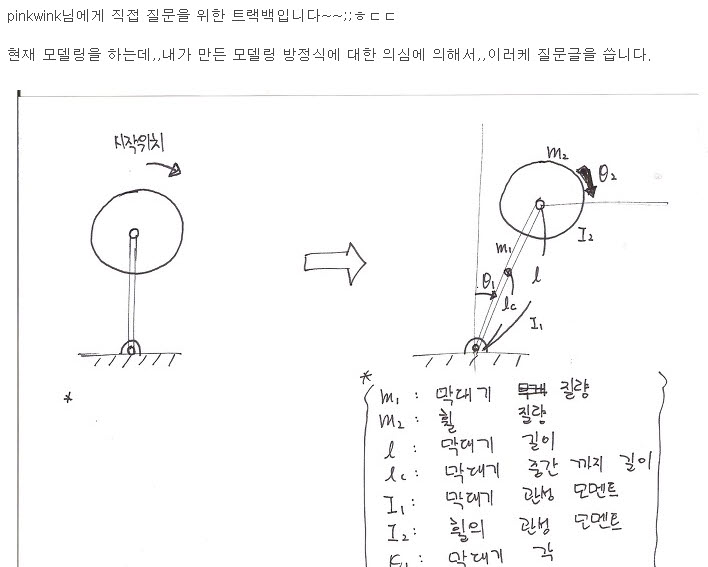
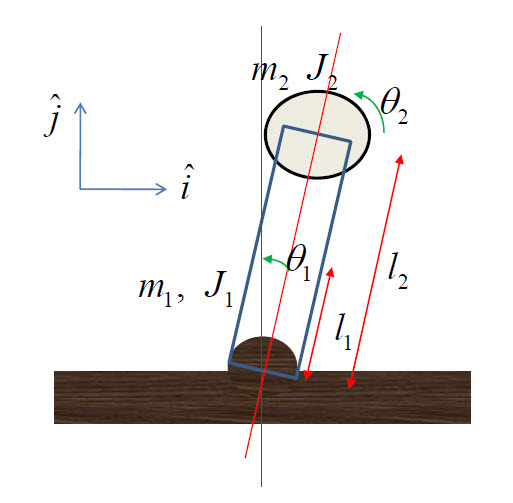
리액션 휠 펜들럼이라는 것은 위 그림처럼 넘어질려고하는 막대를 막대끝에 달려있는 휠(원판)을 돌려서 그 반작용으로 넘어지려는 막대를 세우는(안정화) 시스템입니다. 각 파라미터는 그림에 표시되어 있습니다.
라그랑지안 유도를 위해서는 속도벡터 성분을 알아야합니다. 그러므로 위치벡터를
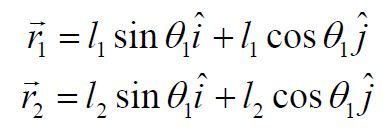
구했습니다. 그러면, 전체 운동에너지는

로 표현할 수 있습니다. 음... 위 수식의 표현이 잘못되었네요. 내적한 후에 미분한 것이 아니라, 각 위치벡터를 미분해서 속도벡터를 구한 다음에 내적한 것입니다. 단지 제가 저 수식을 표현만 잘못했을뿐 이후 과정은 문제가 없으니 패스... (헉.. 절대 수정하기 귀찮아서가 아닙니다...ㅠㅠ)

전체 위치에너지는 위와 같습니다. 이제 라그랑지안(lagragian) L은 전체 운동에저니의 합에서 전체 위치에너지의 합을 뺀것과 같으므로
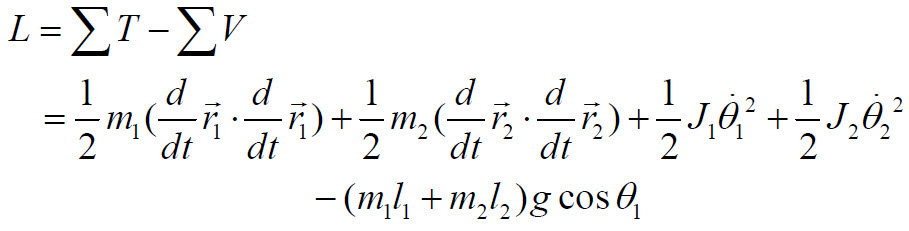
입니다. 이 걸 좀 더 절이하면

입니다.
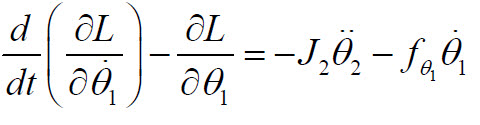
상태 theta1에 대해 라그랑지방정식을 뽑을 건데요. 이때 외력은 마찰력을 고려하고, 또한, 막대에 인가되는 외력은 모터에 의해 회전한 휠의 반력이 인가된다고 보았습니다. 이 식을 다시 정리하면

이 됩니다.
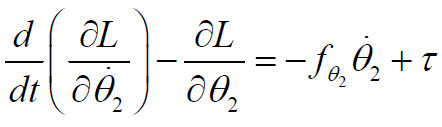
theta2의 라그랑지 방정식을 유도할때 외력을 가정한 것은 역시 마찰력과 모터의 토크인데요. 유도하다보니 여기서 마찰력을 고려한것이 전체 수식상의 정개를 상당히 귀찮게 하더군요. 그래서 없다고 해버렸습니다.^^. 모터토크를 고려할때 생각하면 된다고 가정한건데요. 뭐 기구부를 만들때의 문제이니 전 패스~~
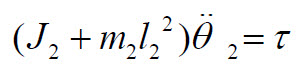
그래서 정리하면 위와 같습니다.
그러나, 여기서 휠의 각도를 '0'으로 보내는 제어는 관심이 없으니 theta2를 꼭 상태로 잡을 필요는 없겠지요. 그래서
이렇게 두고, theta1의 라그랑지방정식에 대입합니다.

|
|
|
그러면 이렇게 정리가 되네요

이걸 더블닷으로 정리를 완료했습니다. 여기서, 시뮬레이션을 위해 파라미터를 가정(실제기구부가 없으니...)해야하는데요
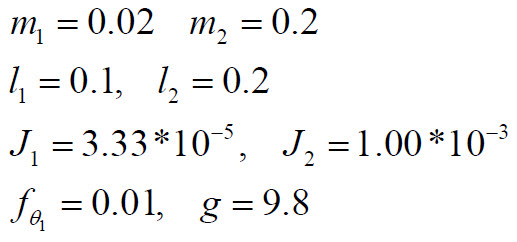
이렇게 가정했습니다. 제 주위에 굴러다니는 원판하나의 무게와 크기를 보고 가늠한 것이니 이 파라미터가 이상해도 뭐.. 어쩔 수 없습니다.^^ 그저 가정이라는...

이렇게... 시뮬레이션을 위해 동역학을 파라미터까지 가정해서 완성했습니다.
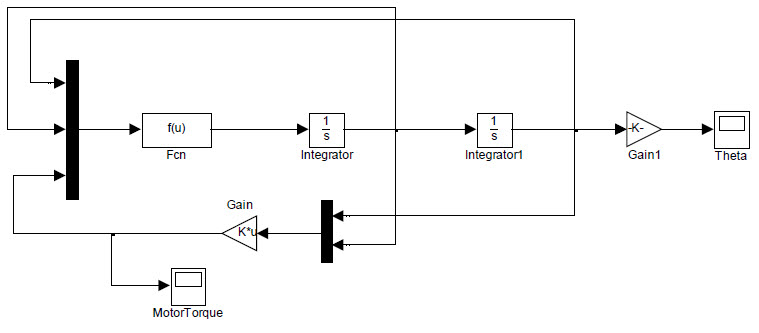
MATLAB/Simulink로 환경을 구축하는데요. fcn문에는
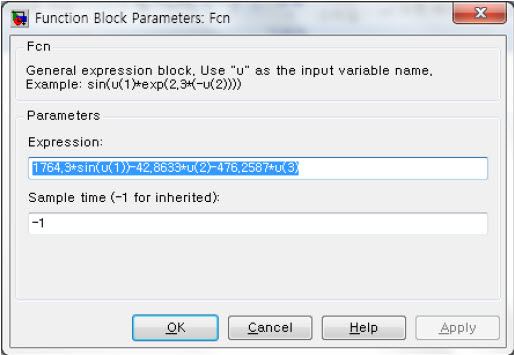
이렇게하고, 제어게인은
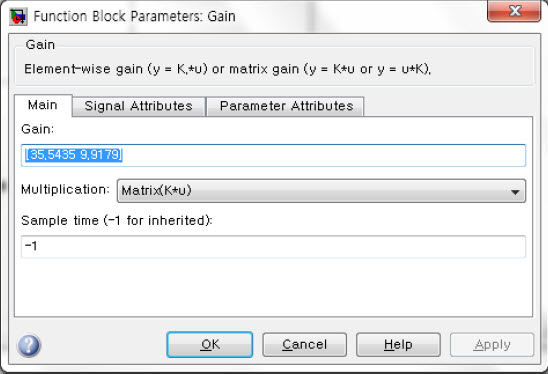
이렇게 두었습니다. 초기각도는 theta1을 3도로 보았습니다.
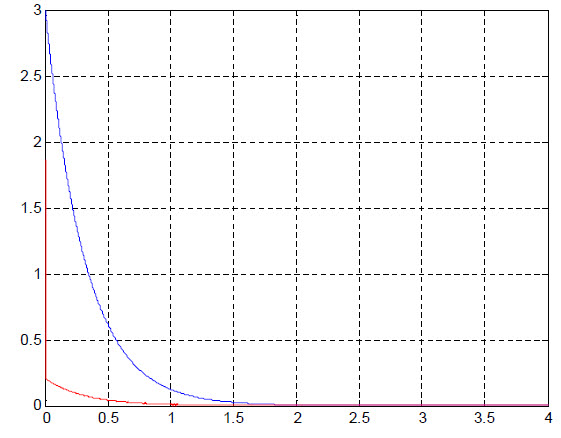
파란선이 각도이고, 빨간선이 모터가 내놓아야할 토크입니다. 만약 제가 가정한 파라미터가 현실성이 있고, 동역학 유도에 큰 문제가 없다면, 이 시스템은 설계가 가능하긴 하겠네요...
그저 한번 재미삼에 유도했는데요... 다음 실험실 학부 논문조가 괜찮은 학생들로 들어온다면, 요걸 한번 시켜보는것도 재미있겠는데요...^^
'The Robot > ControlTheory' 카테고리의 다른 글
| [시스템 시뮬레이션 연재] 1. 라그랑지 방법을 이용한 동역학 모델 구축하기 (20) | 2010/08/09 |
|---|---|
| Reaction Wheel Pendulum. 리액션 휠 펜들럼의 동역학 유도과정 (최종) (10) | 2010/07/14 |
| Reaction Wheel Pendulum. 리액션 휠 펜들럼의 동역학 유도과정 수정 (6) | 2010/06/15 |
| Reaction Wheel Pendulum. 리액션 휠 펜들럼의 동역학 및 시뮬레이션 (10) | 2010/05/14 |
| T-S 퍼지를 기본으로 한 선택적 선형화를 이용한 Two-Rotor (VTOL) 시스템 제어 (4) | 2010/04/19 |
| 밸런싱 로봇의 동역학 유도 (16) | 2010/01/03 |
| 제어입력의 크기를 가늠하기 위한 단순 진자 시뮬레이션 실험 (0) | 2009/11/30 |
| Cart Pendulum의 동역학 유도 (20) | 2009/11/06 |
설정
트랙백
http://pinkwink.kr/trackback/307

-
Reaction Wheel Pendulum. 리액션 휠 펜들럼의 동역학 유도과정 수정
Trackback from PinkWink's Blog
2010/06/15 20:59
[ DELETE ]
예전에 저에게 날라온 트랙백[관련글]에 의해 Reaction Wheel Pendulum의 동역학을 유도[관련글]했던 적이 있었는데요. 요즘 제가 레고사의 마인드스톰 동역학을 밸런싱로봇 연재의 일환으로 공부하다 보니[관련글] 당시의 동역학 유도는 잘못된것이라는 것을 알게 되었습니다.ㅜㅜ 슬프지만... 그래도 수정할 것은 수정해야죠. 마음같아서는 당시의 글을 지우고 싶지만, 또 그럴 수는 없으니, 이렇게 창피하지만, 다시 수정된 글을 올립니다. 항상 그..

어흑 ...마치 천재들의 대화를 보고 있는듯한...ㅎㅎㅎ
그럴리가요...ㅠㅠ 한참 떨어지는 사람들이니 이렇게 대화를 하고 있지요..ㅎㅎ^^
오늘은 눈이 핑핑도네요
그러게요... 위 과정에서 틀린곳이 있는듯해서
(아무도 지적하진 않지만...)
혼자 고민중입니다.. ㅎㅎㅎ
와우!!명쾌한 답변 감사드려요..ㅜ.ㅠ
현재 저희도 몇개의 외국논문..ㅜ.ㅠ만 가지고 연구를 진행중인데,,
완전 막막하네요~.~ㅎ
은근히 될듯 하면서도 이게 잘 서지가 않으니,,,게다가
모터의 반응속도도 너무 떨어지고//
아참!! 저희가 이프로젝트랑 동시에,,비슷하지만 다른(?)프로젝트도
진행중입니다//
아마도,,곧,,거기에 관련된 트랙백이 달리지 않을까 합니다..ㅜ.ㅠ
저희 수준으론 동역학적 해석이 거의 불가능한 상태라서//
자이로휠의 각운동보존량을 강제로 비틀어서 그 반발력을 이용..ㅎㄷㄷ
이게 맞는말인지도 모르겠고,,
조만간에 곧 올리겟습니다.. 그것도 아마,,학부생들에게
졸업 논문 시키기에 좋을듯,,ㅎㅎ
모터의 반응속도가 느리다고 하셨는데 말이죠...
모터의 특성방정식을 토크식에 대입해서
시스템 전체의 동역학 방정식의 입력을 전압으로 두도록 변경해야합니다. 그러면 모터가 느리다는 특성도 동역학에 들어가기 때문에 제어게인을 선정하는데 무리가 없습니다.
언제나 좋은 자료 잘보고 있습니다.
한가지 궁금한게 있습니다. 만일 위 자료가 다 맞다고 가정했을때요
저 그래프에 나타난 모터의 토크 말입니다.
정확한 단위가 얼마가 되는건가요?
N 입니다.
매번 고맙습니다 ㅋ
응?? 어떻게 이렇게 총알처럼 확인을 하시죠?? 헉... 대단