검색결과 리스트
글
제가 일하는 곳에서 한 연구원과 저는 몇 주 전쯤 이런 이야기를 주고받습니다.
(연구원) 뭔가 저희 주행로봇들의 무선 조종기가 일관성이 없어요. 그렇다고 계속 RC용 무선 조종기를 가져다 쓰기엔, 그래도 명색이 로봇회사인데 좀 어색하구요. 그냥 플라스틱 케이스에 둥둥 때려박아서 만드는건 좀 싸보여요.
(PinkWink) 음.. 그럼 어떻게 하죠? (아무 생각이 없음...ㅠㅠ)
(연구원) 뭔가 일관성 있는 모습에 좀 더 보편적인 기능을 가진 뭔가를 만들면 어떨까요?
(PinkWink) 오오.. 훌륭한 생각이에요. 당장 하세요^^
(연구원) 제.... 제가 하는 건가요?ㅠㅠ
(PinkWink) 구럼... 다른사람이 하면 아이디어를 뺏어가는 거자나.. 그럼 얼마나 슬퍼... ㅋㅋㅋㅋㅋ
(연구원) 전.. 전.. 그냥 제 생각을 말씀....
(PinkWink) 오오... 의견의 개진과 그걸 추진하는 능력을 동시에 갖추다니... 훌륭합니다. 그럼그럼...
(연구원) ... ... ... ...
이렇게 해서.. 뭔가를 뚝딱뚝딱 만들기 시작했습니다. 사실.. 최초로 조종기의 필요성을 무쟈게 느끼게 한 놈은 [관련글] -> 이놈 때문이었는데요. 이게 조종기로 세팅하기가 좀 동작이 많았거든요. 그러다가 좀 더 확장성을 생각하게 되었죠.^^

짜잔.. 그렇게 해서.. 저런 주행로봇용 통합조종기 세트가 판생하게 되었답니다.[판매페이지 바로가기] 좀 비싼건 사실입니다만..ㅠㅠ 뭐 가격을 저희도 낮추고 싶었습니다. 그러나.. 주어진 여건이 그렇게 되지는 않더군요.ㅠㅠ. 가격을 낮는것도 진정한 기술력이라는 생각을 합니다. 흑....ㅠㅠ. 아노다이징된 외관에, 고급형 블루투스 송수신기, 배터리와 충전기(물론 조종기쪽만)를 포함했거든요. 힝~. 거기다, 좀 많은 수작업이... 사실 저희가 무쟈게 큰 회사에 무쟈게 이 제품이 잘 팔려서 소위말하면 생산 설계를 쫘~악 깔고, 공정에 맞춰 진행하면 좋겠지만, 이게 또, 그렇게 팍팍 나갈것 같지는 않은 제품 같기도 하고, 또 그런데 설비에 투자하기도 망설여지니... 어쩔 수 없이 일단 소량 생산을 진행하다보니 단가가 무쟈게 높아져버린겁니다. (에휴 왜 여기다 대고 작은 기업의 슬픈 상황이 주저리주저리 읆는지...ㅠㅠ)
하여간 제품은 또 잘 나왔습니다.^^
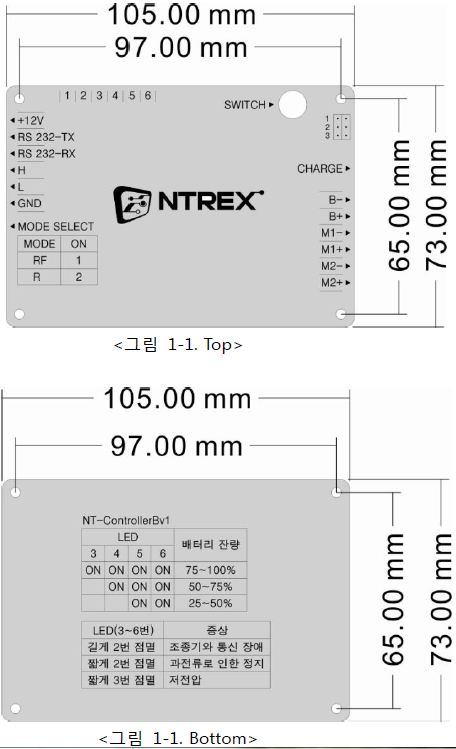
일단 이 놈은 통합보드로 DC모터 단자 두개에 서보모터 단자 두개를 가지고 있습니다. 응? 왜 DC모터 단자가 두 개 뿐이냐구요.? 완전히 정밀한 어떤 움직임이 아니라면 단자 두개만으로 충분히 주행로봇을 다룰 수 있어서 그렇습니다.
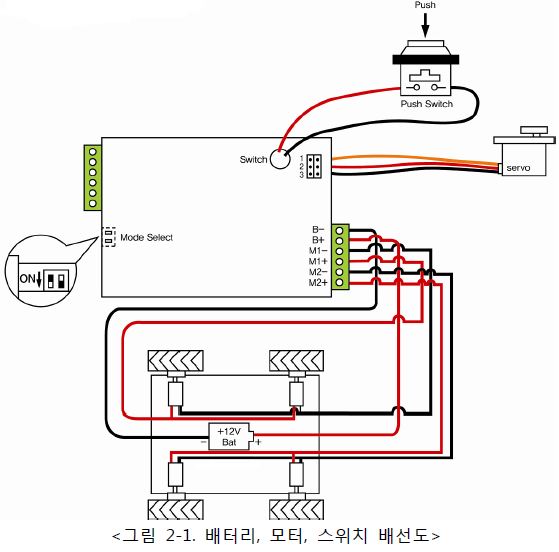
요렇게 결선하시면 DC모터 4개를 가진 주행로봇을 살짝 움직이실 수가 있죠^^
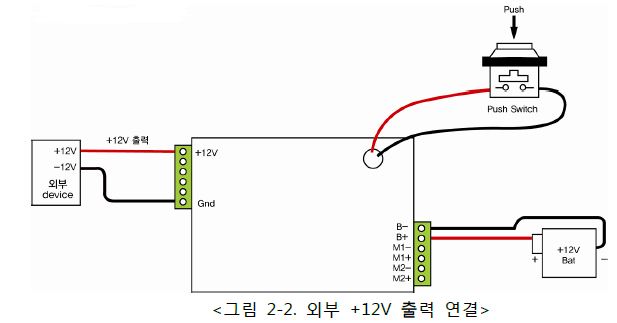
당연히 세트 구성품중에서 통합보드에는 외부전원이 필요합니다. 만들려고하는 로봇에 분명 배터리가 있을테니까요. 저희가 추천하는건 12V연축배터리입니다만, 뭐 통합보드의 기능을 다 못써서 그렇지 아무거나 써도 상관없습니다.^^
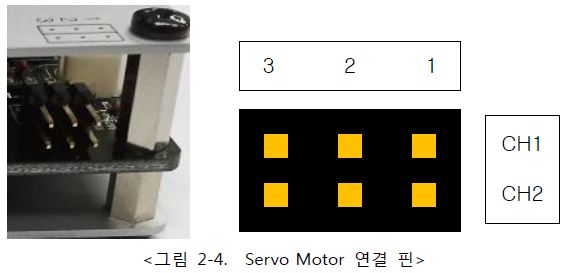
그리고, DC-서보모터 두 개를 위한 단자가 또 배려가 되어있구요.

이 부분이 또 신경을 좀 쓴 부분인데요. 바로, 저희 조종기와 함께 사용할 수도 있지만, 어떤 이유(뭐 예를 든다면, PC나 이런것에서 별도로 조종하고자 할때)에서 통합보드에 직접지령을 내리고 싶으시다면, 위 스위치를 조절해서 RS232로 직접 구동명령을 내릴 수도 있습니다. 자세한 명령셋은 메뉴얼에 무쟈게 자세히 나와있어요^^
 통합보드_메뉴얼1.pdf
통합보드_메뉴얼1.pdf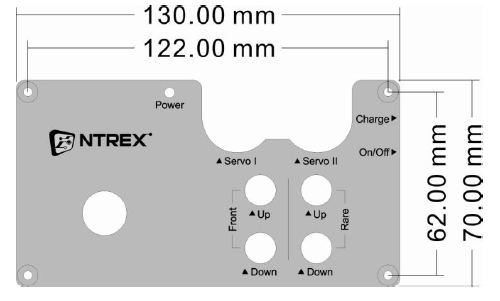
이건 조종기인데요. 블루투스로 연결되는 무선 조종기입니다.

보시면 각종 설명도 뒷면에 있구요^^

저렇게 주 조종레버를 움직이시면, DC모터 두개 혹은 네 개가 구동되구요.

또 저렇게 움직이면 서보모터 두개가 구동이 됩니다. 역시 자세한건 메뉴얼을 통해서^^
뭐.. 백문이불여일견.. 응? .. 아무튼.. 직접 동영상을 보시죠.
동영상 초반에는 DC모터 두개와 서보모터 두개를 어떻게 움직이는지 나타나구요. 후반에는 바퀴 4개짜리 주행로봇에 카메라짐벌을 장착해서 서보모터 두 개가 움직이는 모습을 보여드리고 있습니다.
완전 봄이네요. 이제 저처럼 살찐 종족들이 노출을 두려워하는 여름이 다가오고 있어요...ㅠㅠ. 뭐 또 몸을 가릴 수 있는 겨울이 곧 오겠죠.... (누구보다 지구 온난화를 싫어한답니다.ㅠㅠ)^^ 그래도 꽃구경으로 나들이들 다니세용^^
'The Robot > HardwarePart' 카테고리의 다른 글
| 2채널 핸디형 오실로스코프 추천. OWON HDS1022M-N (20) | 2013/03/06 |
|---|---|
| LinuxCNC/EMC2를 이용하여 스태핑모터 돌리기 설정^^ (20) | 2012/09/05 |
| 로봇 제작시 도움을 주는 도구 - 팝(pop) 너트, 블라인드(blind) 너트 (28) | 2012/05/14 |
| 주행로봇의 무선 조종기 및 구동 컨트롤러 (16) | 2012/04/19 |
| DC 모터의 모션(서보)제어 (Servo Control - Motion Control) (60) | 2011/07/06 |
| 기울어진 각도 측정. 자이로 센서와 가속도 센서 (NT-ARSv1, ARS) (92) | 2011/04/21 |
| 드디어 공들인 제품이 나옵니다. G.INS - ARS (관성항법장치) (58) | 2011/04/08 |
| 1차 상보필터(complementary filter)의 한계 (6) | 2010/12/13 |
설정
트랙백


대박 나시길 바래요^^
전 삼십오만원이 비싼지 싼지도 구분 못하는 인문학 전공자라,,,,ㅠㅠ
하여튼 많이 파시고 그 자본으로 좋은 생산 설비 갖추셔서
좋은 제품 개발 하시길 다시 한번 바랄께요
그러게요. 좋은 제품으로, 호응을 얻고, 그것으로 다시 가격을 낮출수있다면, 그것 또한 환원이라고 생각을 합니다. 물론 저희도 거창하게 환원하고 싶지만 말이죠^^
선풍기가 생각이 나는 군요...ㅋㅋ 이런 기본 원리를 통해서 만든 소형자동차의 움직임이 장난이 아니네요.. 턴이 엄청 부그러워요..
네.. 살짝 주행성능에도 신경을 좀 썼답니다.^^
물론 확 좋아진건 아닙니다만^^
우왕 멋지네요. 역시 대화를 통해서 무엇인가가 만들어지고 하나 봅니다. 그럼 이제 저 조종기가 기본 플랫폼이 되는것인가요. 아주 어려운 과정을 통햇거 만들어졌을텐데 결과물이 참 보기가 좋습니다.^^
히히.. 그 대화가 그 연구원에게 아름다웠을지는 좀 생각해봐야겠지만.. 하여간.. 역시 모든것은 대화로 시작해서 대화로 끝나는것 같습니다.^^
ㅋㅋㅋㅋㅋㅋ 대화 내용 넘 잼있어요...
혹시 저같은 일반인이 핑크윙크님이 만드시는 무선 조종 자동차를 볼 수 있는 전시회도 있어요~~? +_+
네.. 로봇 전시회들이 열리지요. 통상 9월이나 10월경에 열리는 로보월드라는 전시회가 있습니다.^^
개인적인 욕심이지만 어댑터(?)를 이용해서 TV 리모컨을 사용한다던가 하면 어떨까 하는 생각이 있긴해요.
IR 리시버와 그걸 이용해서 RS-485로 연결해주는 식으로 말이죠 ㅋ
좋은데요.^^. 엔지니어한테 한번 말해봐야겠어요^^
오늘 구매해보았는데요 설명서대로 연결시 4개의 모터가 같은방향으로 회전되더군요.
간단히 말하자면 직진을 하고자 하는데 모두 같은방향으로 회전하므로 제자리에서 빙글빙글 돌기만 할수
밖에 없다는거죠. 그래서 한쪽은 +를 -에 연결하고 -를 +로 연결해야만 정상적 주행이 가능하게되는데
여기서 질문
① 제가 구매한 제품에 문제가 있을까요?
② 원래 한쪽은 설명서를 무시하고 반대로 연결해서 사용하는 제품인가요?
③ 만약, 지금처럼 한쪽방향은 반대로 연결해서 사용하는 제품인경우 모터의 토크등에는 지장이 없는지요?
궁굼해서 여쭙니다.
네 아무 이상이없습니다. DC모터이니까요.
방향설정의 문제에서 DC는 구애받지 않습니다.
저희도 메뉴얼 시 모터입장에서 +-가 오히려 혼돈을 줄 것 같아, 로봇의 주행방향입장에서 붙인것 뿐이랍니다.
가격과 통신거리가 궁금하고, 연구소나 연락 가능한 매체는?
글초반에 판매페이지를 안내했습니다
비밀댓글입니다
3~6번이 전체 점멸이라도 1번 2번 3번에 따라 상황이 다릅니다.
일단, 오류가 의심되시면, 디바이스마트의 고객센터를 통해 A/S를 접수하시면 됩니다. 실제로 엔지니어들이 제품을 확인하지 않으면 딱히 답변하기 어려울 수도 있습니다.