검색결과 리스트
글
ㅎ,, 가끔 무식이 용감하다는 말을 하게 혹은 듣게 되는데 요즘 제가 그런모양입니다. 최초 myGyro300SPI를 통해 4개의 데이터(자이로센서의 출력에 온도를 고려하기)를 받으면서 저의 실수로 문제점을 보게 되고, 그래서 다시 Withrobot에 질문을 보내고... 정말 고맙게도 irmus님의 답변을 받게 되었습니다. 그리고 다시 두 종류의 의문중 하나는 이해도 되고 해결도 했는데 하나는 뭔가 2%부족한 결과(^^)나 나왔다는 것을 다시 트랙백을 통해 질문(자이로센서 myGyro300SPI의 통신문제 해결)하게 되었습니다. 그리고 너무나도 고맙게 irmus님께서 다시 제 홈에 답변(사실을 질타....ㅜ.ㅜ)를 넣어두셨습니다. 근데 창피하게시리 두 번째 질문에서 제가 바꾸었다는 코드를 제가 잘못보냈네요..ㅋㅋㅋ 그래서 다시 그 해당글(자이로센서 myGyro300SPI의 통신문제 해결)을 수정할려다가 그냥 다시 쓰는게 낫겠다 싶어 이렇게 다시 쓰게 됩니다.^^. 헤... 이쯤되면 irmus님도 지치실듯....ㅜ.ㅜ... irmus님 죄송합니다... 그러나 어쩌겠습니다. 저는 답답함을 넘어서서 미칠것같으니...ㅜ.ㅜ
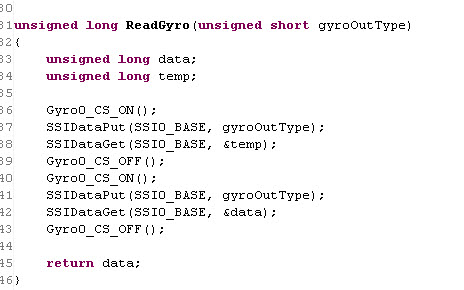
먼저 위와 같이 irmus님의 최초답변처럼 꾸몄습니다. ^^ 사실 이전(자이로센서 myGyro300SPI의 통신문제 해결)글 에도 저렇게 했는데 제가 실수로 잘못된 코드를 올리고 말았네요...^^...그 결과로 받은 자이로의 출력을 아무 가공없이 그냥 plot해 보면
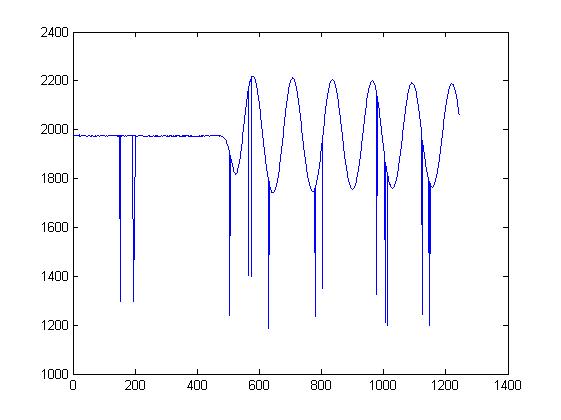
와 같습니다. 데이터가 눈으로 지나갈때와 보정필터를 사용할때 혹은 데이터를 받고 또다시 별도의 필터링을 할때는 저 갑자기 튀는 부분은 관찰하기 어렵습니다. 저도 처음에는 모르고 있다가 온도보정을 요즘 계속 실험하면서 적분치의 오차를 어떻게든 잡을려고 하다보니 발견한 것입니다. 아무 가공없니 테스트한것을 plot하기만 했으니 x축이 좀 의아하실수도 있는데 *0.01을 하시면 시간입니다.
의문을 가지고 다시
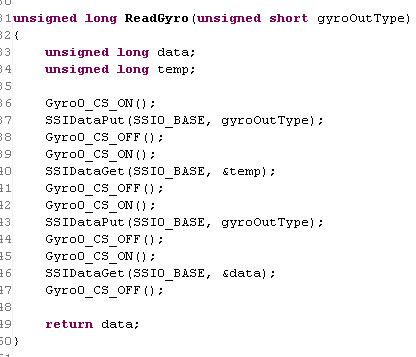
위에서처럼 CS를 온오프하는것을 곳곳에 넣어주게 된것입니다. 위와 같이 하고 동일 방법으로 데이터를 획득하고

나서 보면 위에서처럼 깨끗한 데이터를 얻을 수 있습니다. 또한 오실로스코프로 타이밍을 관찰하고 그리고 데이터시트의 타이밍도와 비교하였을때 (사실 이것은 잘 자신이 없습니다만..ㅜ.ㅜ 제가 이런 실험에 약간 생소하기도 하고 뭔가 찜찜하다는 느낌이 있어서...ㅜ.ㅜ... ) 관찰 결과는 명령을 주고 데이터를 받을때 분명 말씀하신데로 해야할것같습니다. 데이터 시트의 FIGURE2를 봐서는요.... 그러나 그 결과는 위와같아 잠시 주춤합니다...^^ 저의 두번째 질문 (자이로센서 myGyro300SPI의 통신문제 해결) 이 오류가 있어 이렇게 다시 질문을 정리했습니다. 그리고 무엇보다 irmus님과 withrobot에 이렇게 친절한 답변에 감사드립니다...
언제나 초보의 길은 무식하고 용감하지만 한편으론 참 답답합니다. 그걸 지켜보는사람도 그 당사자도...ㅜ.ㅜ



먼저 위와 같이 irmus님의 최초답변처럼 꾸몄습니다. ^^ 사실 이전(자이로센서 myGyro300SPI의 통신문제 해결)글 에도 저렇게 했는데 제가 실수로 잘못된 코드를 올리고 말았네요...^^...그 결과로 받은 자이로의 출력을 아무 가공없이 그냥 plot해 보면
와 같습니다. 데이터가 눈으로 지나갈때와 보정필터를 사용할때 혹은 데이터를 받고 또다시 별도의 필터링을 할때는 저 갑자기 튀는 부분은 관찰하기 어렵습니다. 저도 처음에는 모르고 있다가 온도보정을 요즘 계속 실험하면서 적분치의 오차를 어떻게든 잡을려고 하다보니 발견한 것입니다. 아무 가공없니 테스트한것을 plot하기만 했으니 x축이 좀 의아하실수도 있는데 *0.01을 하시면 시간입니다.
의문을 가지고 다시
위에서처럼 CS를 온오프하는것을 곳곳에 넣어주게 된것입니다. 위와 같이 하고 동일 방법으로 데이터를 획득하고
나서 보면 위에서처럼 깨끗한 데이터를 얻을 수 있습니다. 또한 오실로스코프로 타이밍을 관찰하고 그리고 데이터시트의 타이밍도와 비교하였을때 (사실 이것은 잘 자신이 없습니다만..ㅜ.ㅜ 제가 이런 실험에 약간 생소하기도 하고 뭔가 찜찜하다는 느낌이 있어서...ㅜ.ㅜ... ) 관찰 결과는 명령을 주고 데이터를 받을때 분명 말씀하신데로 해야할것같습니다. 데이터 시트의 FIGURE2를 봐서는요.... 그러나 그 결과는 위와같아 잠시 주춤합니다...^^ 저의 두번째 질문 (자이로센서 myGyro300SPI의 통신문제 해결) 이 오류가 있어 이렇게 다시 질문을 정리했습니다. 그리고 무엇보다 irmus님과 withrobot에 이렇게 친절한 답변에 감사드립니다...
언제나 초보의 길은 무식하고 용감하지만 한편으론 참 답답합니다. 그걸 지켜보는사람도 그 당사자도...ㅜ.ㅜ
'The Robot > HardwarePart' 카테고리의 다른 글
| 기울기센서 SA1 테스트 (12) | 2009/07/28 |
|---|---|
| 자이로 센서 Identification 선형특성 파악 (0) | 2009/07/23 |
| 쿼드콥터 장난감 하나를 구입하다... (8) | 2009/07/15 |
| 자이로 myGyro300SPI 통신문제 (보완질문) (2) | 2009/06/22 |
| 자이로센서 myGyro300SPI의 통신문제 해결 (3) | 2009/06/22 |
| 자이로센서를 이용한 각도 측정시 가속도센서로 보정하기 (108) | 2009/06/17 |
| 자이로센서의 출력에 온도를 고려하기 (21) | 2009/06/15 |
| 자이로센서를 이용한 각도검출과 그 한계 (112) | 2009/06/13 |
설정
트랙백
http://pinkwink.kr/trackback/81


이제 오실로스코프가 등장할 차례입니다. 다시말해, 소소코드만 보고 왈가왈부 할 단계는 아닙니다.
지금 테스트중인 소스코드를 검증하기 전에 기본단위-SPI로 자이로 값을 읽어오는 함수-부터 오실로스코프로 관찰하면서 디버깅하시는 것이 좋을것 같습니다.
ㅎㅎ...답변하시면서 지치실듯합니다. 충분히 지치실것을 이해한다는...
이번글은 이전글의 보완질문이라 올리지않았는데
오실로스코프상의 파형을 관찰중입니다.
문제는
제대로된데이터가 아닐때의 상황을 읽는것이
조금 어렵기때문이고
그래도 오실로스코프로 관찰하는데 디카로 찍어올릴수없기 때문에 업데이트를 살짝 미루고있습니다.
게다가 계절학기수업이 시작되어서...(ㅜ.ㅜ)
하여간...
또 답변에 감사드립니다...ㅋㅋㅋ^^