We’re pleased to announce that we’ve recently become a distributor for Seeed Studio, and as such we now have a brand new range of exciting products that you can use in your robotic projects.
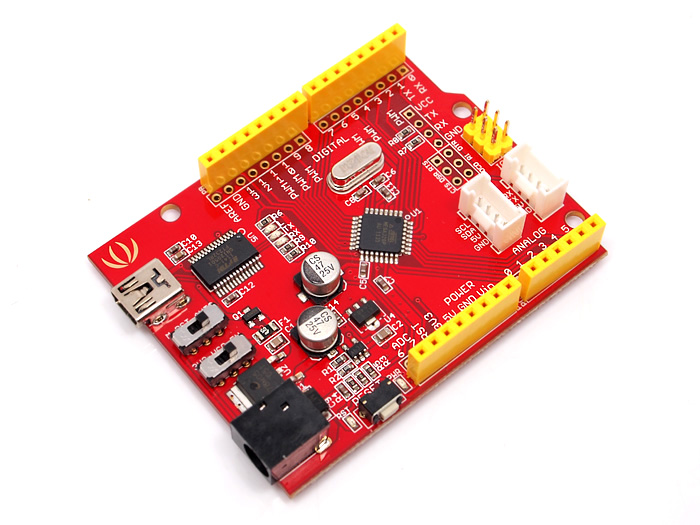
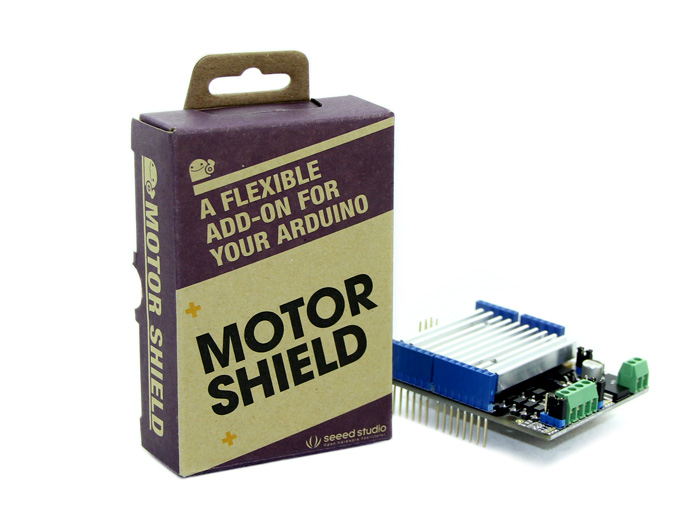
Chief amongst these is the Seeeduino, Seeed Studio’s take on the Arduino, and a number of very useful Arduino Shields. Seeed Studio have really tried to innovate with the Seeeduino, making a number of changes, rather than just blindly ripping off the Arduino design, and as such, it offers a very useful, and affordable controller for your robotic and electronics projects.
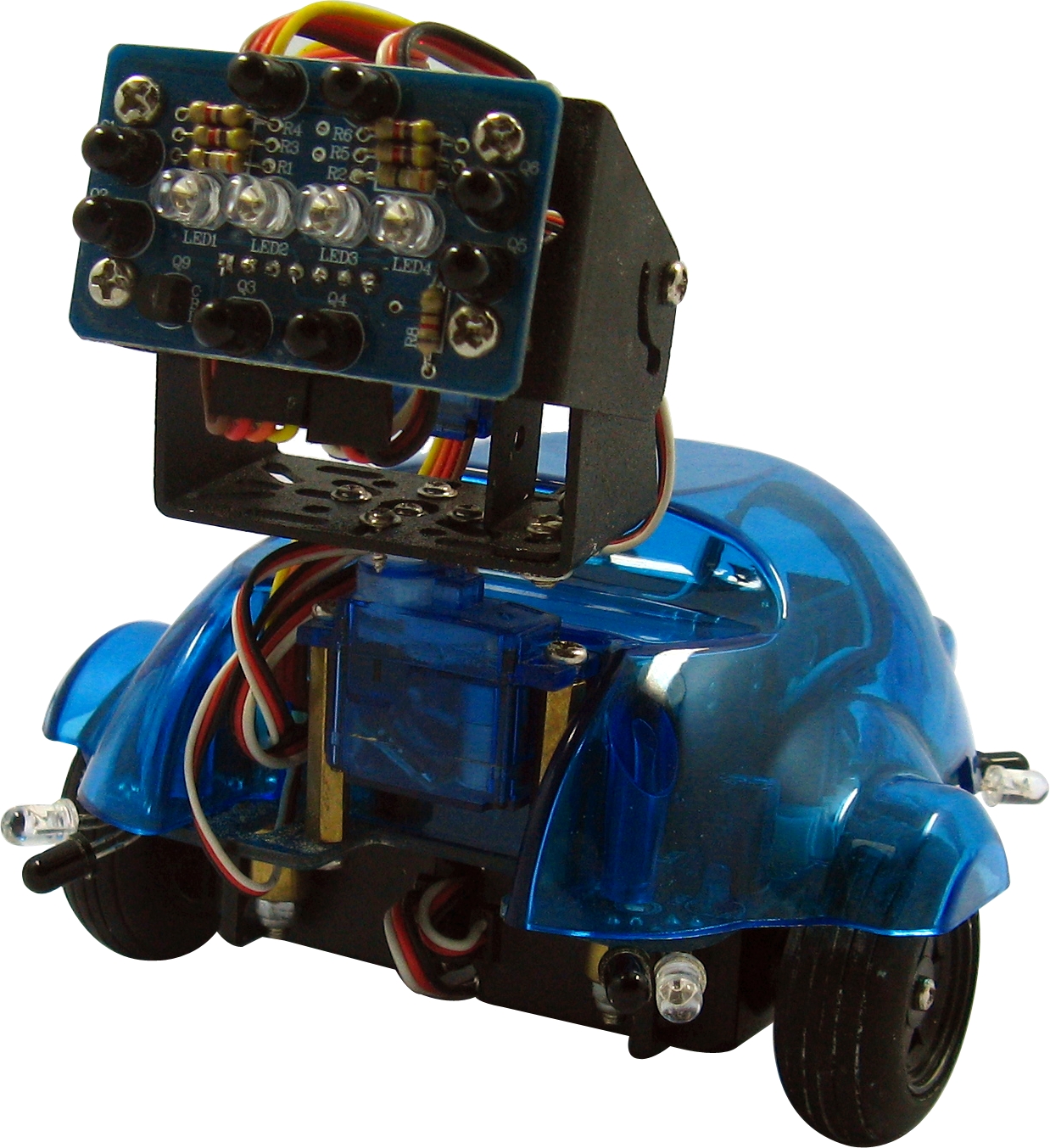
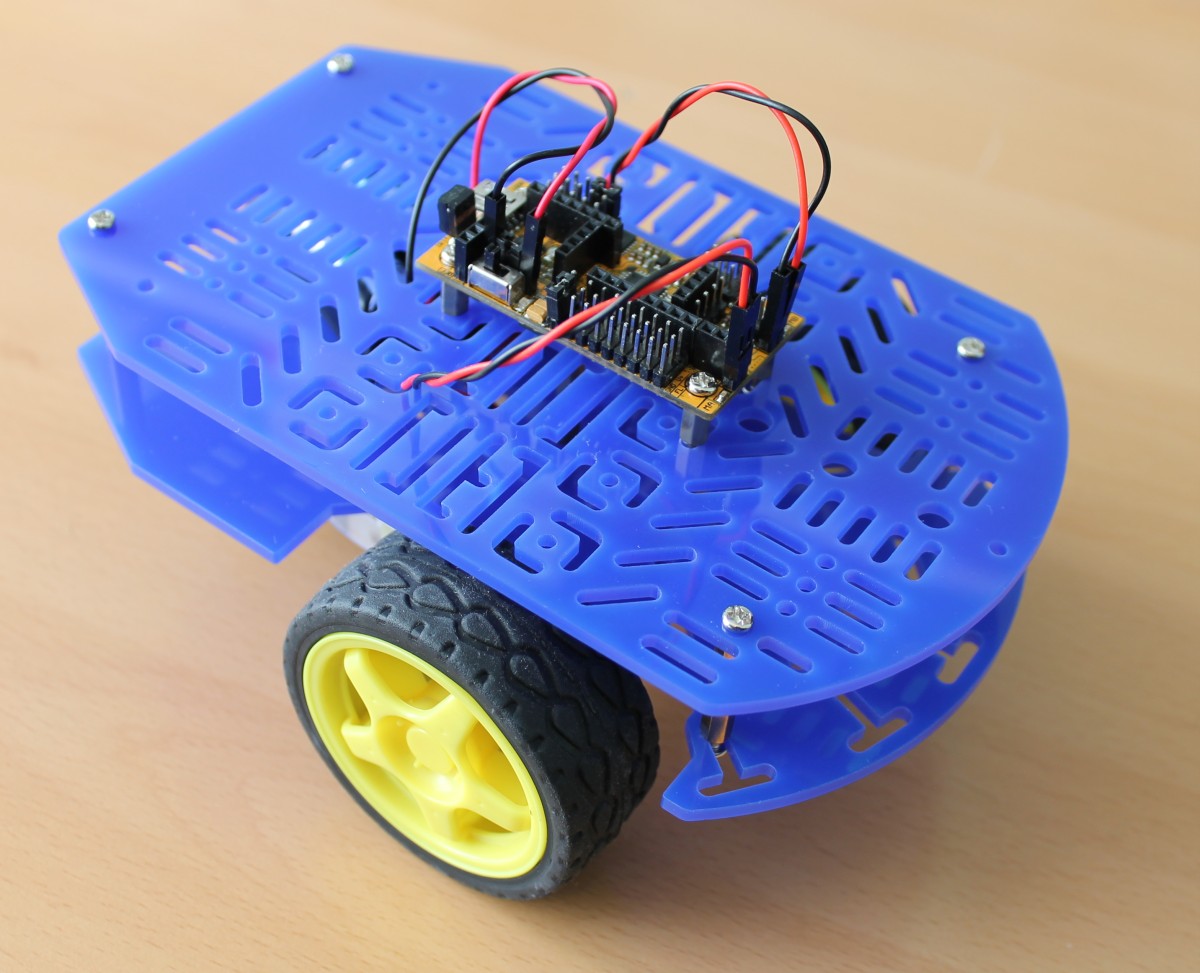
That’s not all we have from Seeed Studio though, we have motors, a breadboard power supply and more. So, please, check out the new range, and start planning your next robot. ![]()