(If you’ve no time to read then could you please just spend a moment and vote? Thank you!)
Readers who check back on this blog from time to time may have noticed that since the end of November 2014, we’ve been very quiet, and nothing much has been written on this blog (apart from responses to comments). The reason for this is that I (Alan Broun) have been focusing pretty much full time on trying to finish off my PhD at the Bristol Robotics Laboratory and this hasn’t left much time to spend on Dawn Robotics (which is based in the BRL Technology Incubator). My colleague Martin, has been doing a wonderful job, packing orders, building kits and keeping Dawn Robotics going over the last 5 months, but I do most of the development work, so things have been in stasis for a bit.
Now though, I’m almost (almost… so close…) at the point where I can hand in, and although I do need to go off and do some contract programming work for a couple of months to rebuild my finances (Dawn Robotics doesn’t quite pay the bills yet) I am hopeful that Dawn Robotics will soon be back to producing new stuff. ![]()
This brings me to the point of this blog post. Dawn Robotics has entered into a competition run by an organization called Jisc which is offering up to £20,000 to help startup companies to develop and pilot products for use within schools and universities. But in order to be considered for a prize we need votes from members of the public i.e. you!
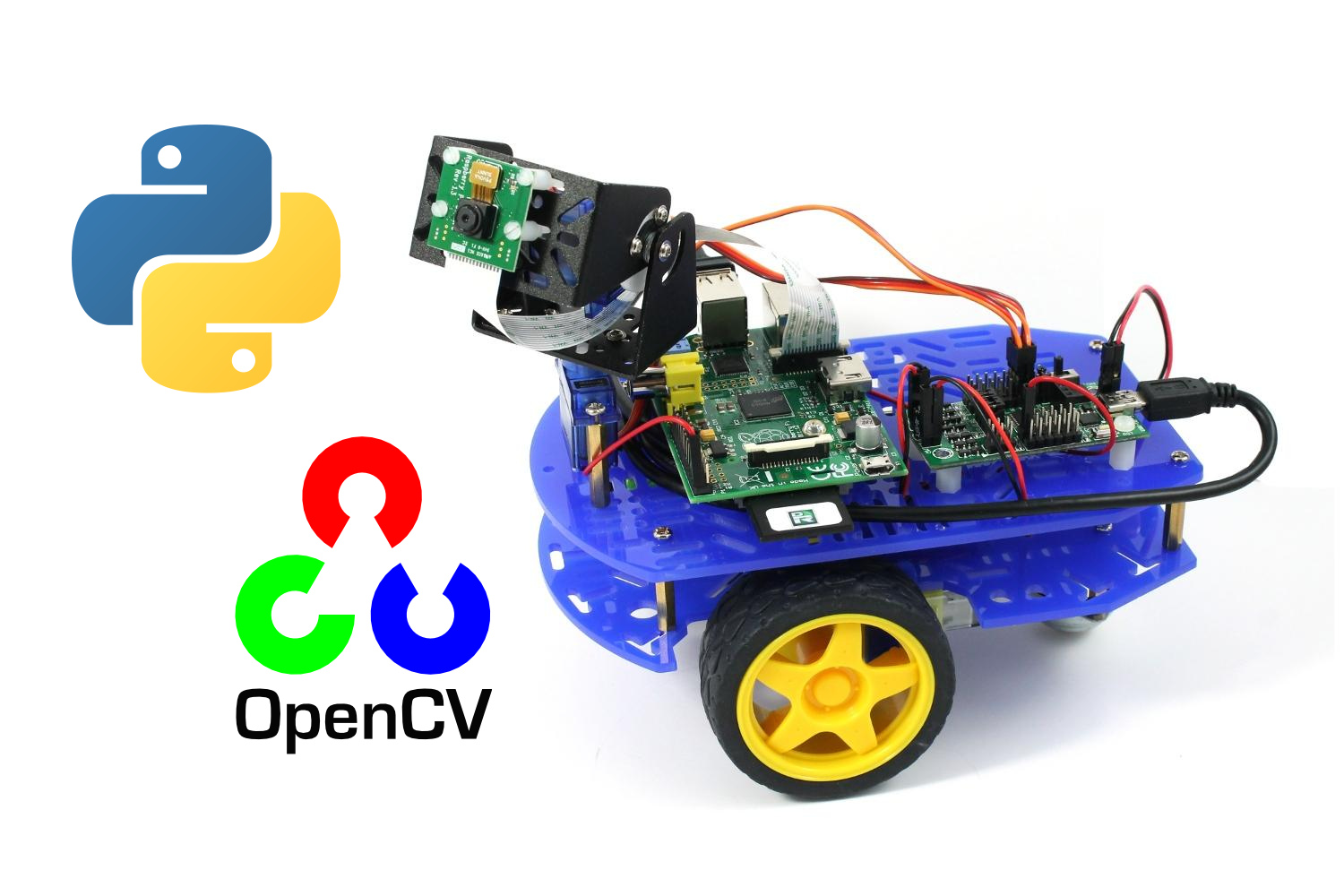
The product that we’ve put forward for consideration is our Raspberry Pi Camera Robot. This was originally released last year, targeted at hobbyists, but since then, a number of tech savvy teachers have bought the kit, and started to use it in schools. This makes sense in a lot of ways, as computing and programming are being seen as increasingly important in UK schools, and we feel that robotics is an absolutely fantastic way to engage kids and get them excited about programming. The trouble is, that it’s not as easy to use the robot in schools as it could be. The documentation for the robot is a bit lacking, being spread out over a number of blog posts, and we don’t have any dedicated teaching materials, such as lesson plans to use with the robot.
If we were lucky enough to win funding in the competition, then we’d use the money to change that. We’d use the money to improve the documentation for the robot and to create a range of lesson plans to make it easy for teachers to use the Pi robot in schools. We’d also use some of the money to refine the kit and its software to make it easier to use in schools (currently, connecting multiple robots to a school’s network is tricky). Also, the kit would be piloted in a number of schools to see if there were any other ways that we could improve the kit further. You don’t have to worry that this is all for for the benefit of Dawn Robotics either. The documentation and lesson plans will be released under a Creative Commons Share Alike license, and all of our software for the Pi Robot is open source under the BSD license. So hopefully, enthusiastic teachers will be able to get value out of the lesson plans and software, even if they don’t have one of our robot kits.
Anyway, hopefully you’re convinced. Please check out our pitch video below, and vote for us here. Also, if you could pass the link on and encourage other people to vote, then that would be most awesome. ![]()






 Co-op
Co-op