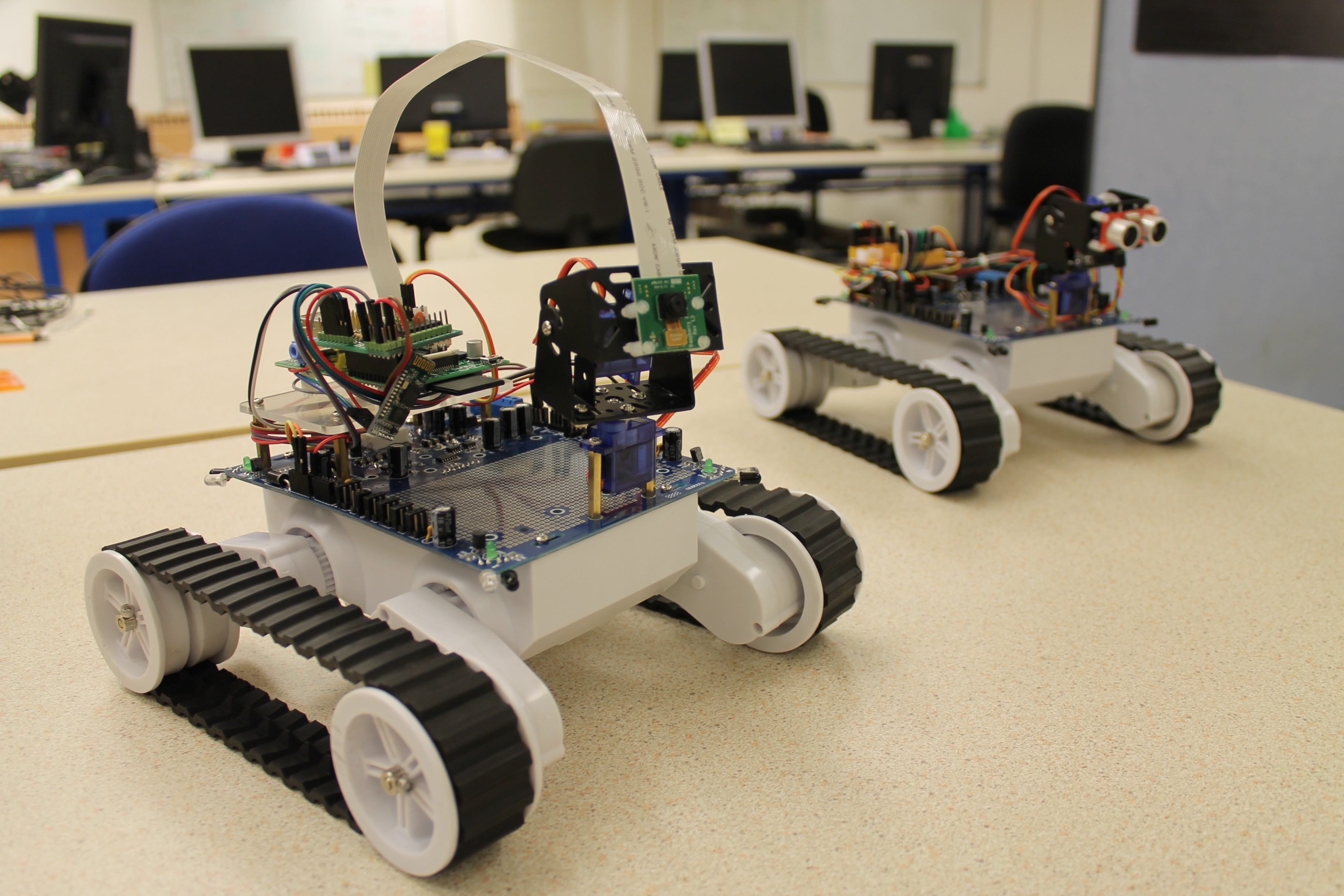
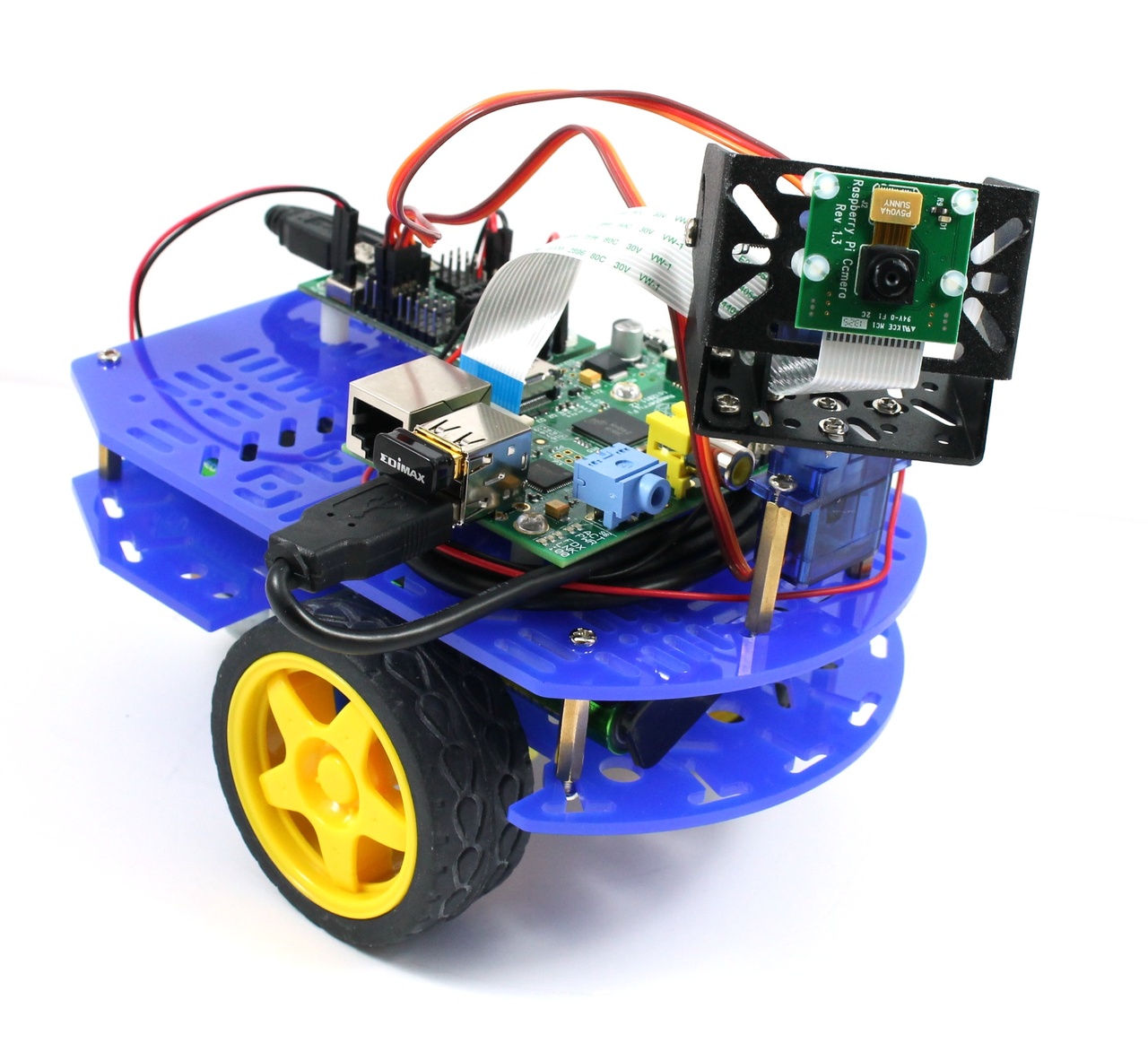
 A Raspberry Pi with a camera, gives you a small, low cost, embedded vision system, but it’s not very mobile. In this tutorial we show you how to fix that by attaching it to a robot to give you a Raspberry Pi camera robot! The robot is WiFi enabled which means you can drive it around using a tablet, phone or computer, using the camera to explore remote areas.
A Raspberry Pi with a camera, gives you a small, low cost, embedded vision system, but it’s not very mobile. In this tutorial we show you how to fix that by attaching it to a robot to give you a Raspberry Pi camera robot! The robot is WiFi enabled which means you can drive it around using a tablet, phone or computer, using the camera to explore remote areas.
We’ve tried to keep the components for this tutorial as affordable as possible, and as such we’re using the Dagu Arduino Mini Driver to control the motors and servos of the robot. This board also contains a 1A voltage regulator which we can use to power the Pi. Now a limit of 1A is a bit tight for the Pi, but we’ve found that with the right WiFi dongle, the Mini Driver voltage regulator can happily power itself, the Pi, a camera, and WiFi. All the ingredients you need for a camera robot. ![]()
Update: This robot also works with the Model B+ Pi, and the new Raspberry Pi 2. We’ve updated the instructions to reflect this below.
Update: We’ve now changed the robot slightly so that it uses a UBEC to power the Pi. This extends the battery life of the robot, and increases the current limit for the Pi to 3A.