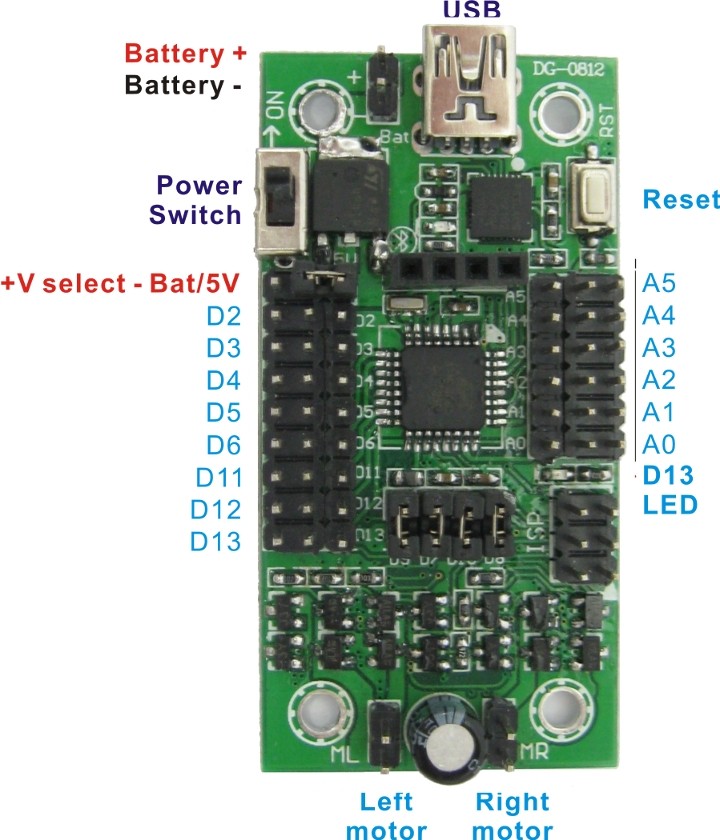
If you want an affordable way to drive DC motors, to control servos, and to add an ADC to your project, then the Dagu Arduino Mini Driver Board could be well worth a look. It can be hooked up to a Raspberry Pi with a USB cable to provide the hardware interface for a Pi project. Or alternatively, it can be used alone as a much smaller, and cheaper alternative to an Arduino with a motor shield.
Documentation is a bit thin on the ground for this board however, so we thought we’d put together a simple getting started guide, and show you how you can use the Mini Driver to control some motors.