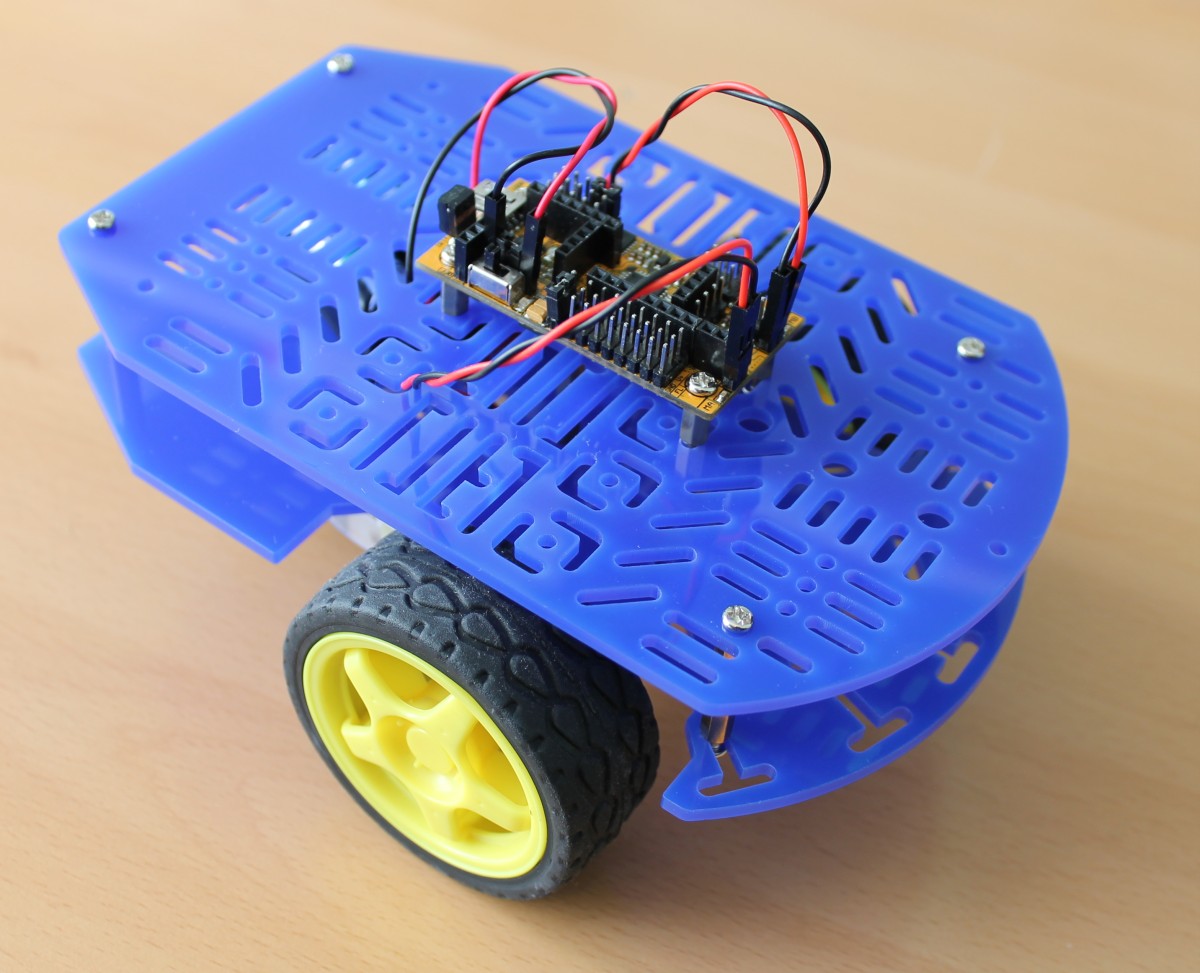
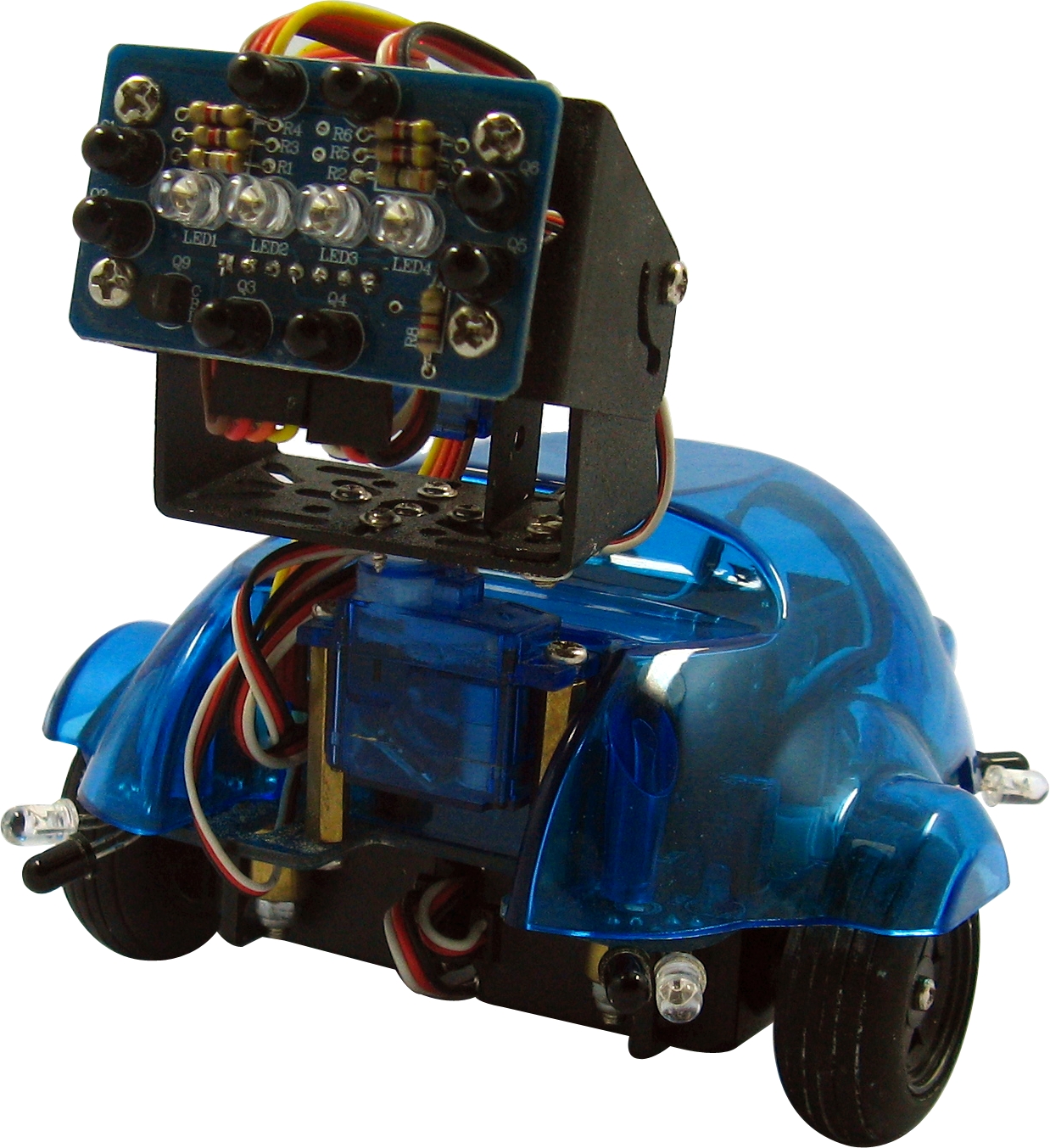
 If you’re new to the world of robotics, or if you want a nice platform to learn robot programming, then the Adventure Bot by Dagu is a great choice. This guide takes you through the process of getting started with the Adventure Bot, and running your first program. Continue reading
If you’re new to the world of robotics, or if you want a nice platform to learn robot programming, then the Adventure Bot by Dagu is a great choice. This guide takes you through the process of getting started with the Adventure Bot, and running your first program. Continue reading
Getting Started with the Dagu Adventure Bot
Leave a reply