검색결과 리스트
글
Q u a d r o c o p t e r
I. 무인항공기 (UAV)의 필요성

무인항공기는 사람이 작업하기에 위험하거나, 혹은 단순한 작업의 반복이 아주 많을 때, 그 가치가 높다. 그러므로 군사용으로 적 타격 혹은 적 정찰에 적합하고, 또한 넓은 지역에 농약을 살포한다던지 기상예보를 위한 관측 등의 분야에서도 그 활용범위가 넓다.
II. 기존의 비행체를 무인화 하기.
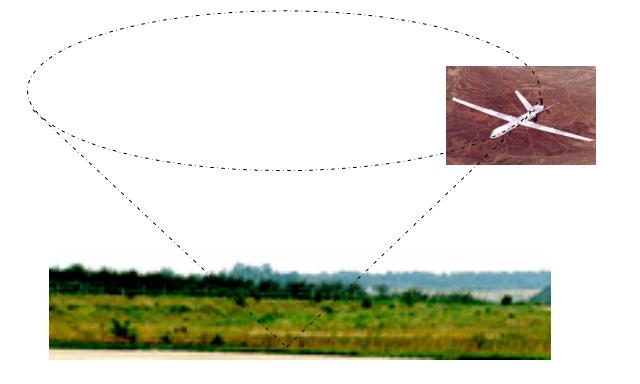
위 그림에서처럼 날개가 달린 비행기는 그 제어가 쉽다는 장점이 있지만, 어떤 한 지점위를 오랫동안 있기 위해서는 꽤 넓은 공간을 선회해야하는 단점이 있다. 반면에 헬리콥터는 제자리 비행이 가능하여 작업영역의 선정에서 비행기보다는 유리하다.
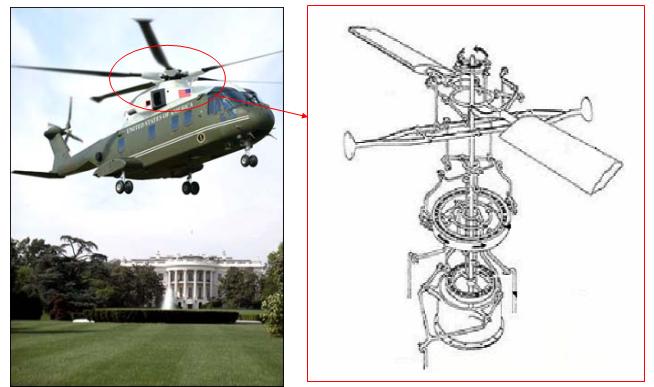
그러나 헬리콥터는 무인제어를 하기 위한 알고리즘을 생각하는 입장에서는 그 구동원리가 상당히 복잡해져서 수학적 모델을 얻는 것이 아주 힘들며, 여러 불확실한 환경에 적응하기가 힘들다는 단점을 가지고 있다.
III. 쿼드로콥터의 필요성
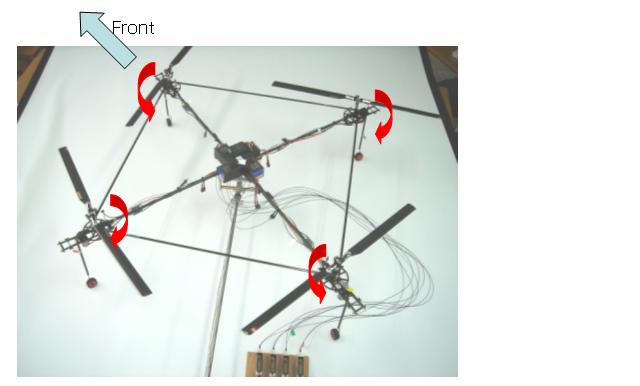
쿼드로콥터는 네 개의 블레이드가 달린 헬리콥터라는 의미로 Quadro Rotor type Helicopter의 합성어이다. 쿼드로콥터의 명칭 꽤 많은데, 가장 많이 쓰는 명칭은 쿼드콥터, 쿼드로콥터이다. 영어로는 Quadcopter, Quadrocopter, Four-Rotor flying robot 등이며 간혹 쿼드콥터를 만드는 제작사의 제품명으로도 불리기도 한다. 드라곤플라이어(Dragon Flyer) 등. 아래는 그중 조종기로 조종하는 것중 유투브의 동영상 하나를 소개한다. 2007년 8월25일에 올라온 동영상이며 마이크로드론스라는 독일 회사의 제품이다. 꽤 좋은 비행성능을 보이고 있음을 알 수 있다.
'The Robot > ControlTheory' 카테고리의 다른 글
| T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 (0) | 2009/07/20 |
|---|---|
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009/07/20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (10) | 2009/05/31 |
| 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 (2) | 2009/05/19 |
| 쿼드콥터(Quadcopter)의 동역학 방정식 (16) | 2009/05/19 |
| 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 (6) | 2009/05/19 |
| Two-Rotor (VTOL) 시스템의 동역학 모델 (6) | 2009/05/19 |
| 쿼드콥터 소개... (6) | 2009/04/20 |
설정
트랙백
http://pinkwink.kr/trackback/40


동영상보면 40초전후에 투명한 실이 보이는것 같은건 저만 그런가요?^^;
그러게요.. 저도 보이긴하네요..
그래도 세계적으로 소형 RC 헬기에선 유명한 회사인데
설마 실을 달아놨겠습니까... 또 이후 영상에서는 하늘높이 오르는데 말이죠.. (안테나일까요???^^)
수신기 안테나같은데요
네.. 그럴거라 생각하는데도.. 근데.. 좀 길기도 하죠?? ㅎㅎ
그래도 말씀하신것처럼 분명 안테나일거에요^^
한참 관심있는 쿼드콥터에 대한 약간의 이해를 할 수 있었네요.
롤, 피치, 요의 원리에 대해서 알고 갑니다.
네 감사합니다.