검색결과 리스트
글
궤환선형화기법을 이요해서 투로터를 제어(궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계)했었습니다. 그걸 쿼드콥터(쿼드콥터(Quadcopter)의 동역학 방정식)에 적용해 보겠습니다.
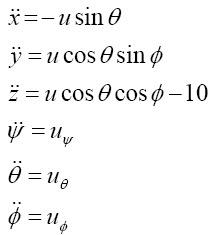
위 동역학을
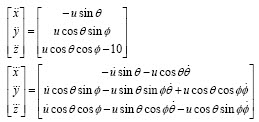
한번 더 미분하고

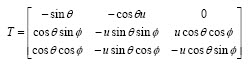
식이 기니까 A, B, C, T로 치환하면 한번 더 미분한 식은
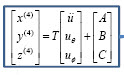
와 같이 나타납니다.
위 4차계시스템을 안정화하는 a, b, c, d를 설정하고나면
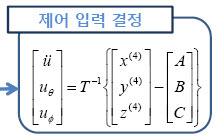
최종적으로 제어입력을 위와 같이 구성할 수 있습니다.
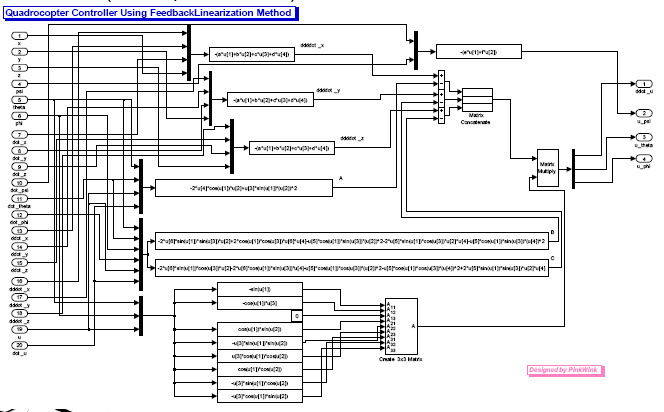
Controller의 전체 블럭입니다.
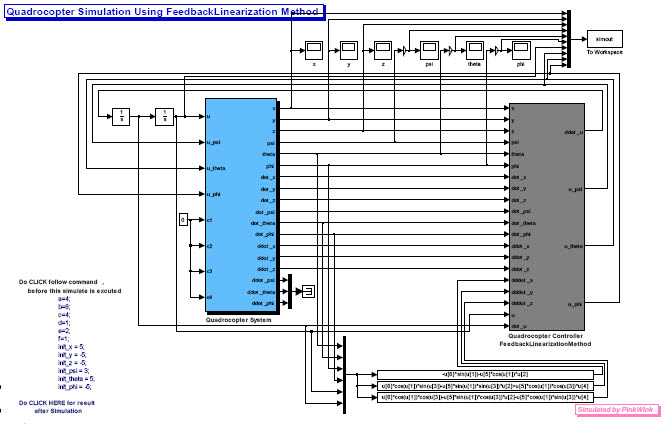
이전에 공개한 쿼드콥터의 블럭과 같이 연결해서 사용하면 됩니다.
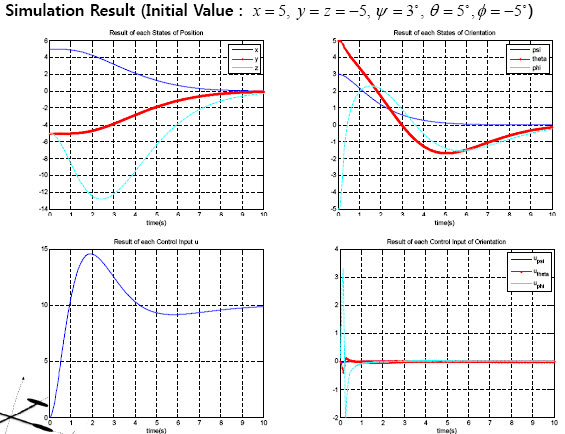
제어 결과 입니다...^^
'The Robot > ControlTheory' 카테고리의 다른 글
| T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 (0) | 2009/07/20 |
|---|---|
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009/07/20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (10) | 2009/05/31 |
| 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 (2) | 2009/05/19 |
| 쿼드콥터(Quadcopter)의 동역학 방정식 (16) | 2009/05/19 |
| 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 (6) | 2009/05/19 |
| Two-Rotor (VTOL) 시스템의 동역학 모델 (6) | 2009/05/19 |
| 쿼드콥터 소개... (6) | 2009/04/20 |
설정
트랙백
http://pinkwink.kr/trackback/59


3D로 쿼드콥터를 시뮬레이션하려합니다..
위에 블럭들이 잘 보이지가 않아서요 ㅠㅠ
파일 또는 저 그림이 잘 보이는 파일을 얻을 수 있을까요
단지 수식을 블럭으로 표현했을 뿐이랍니다.