검색결과 리스트
글
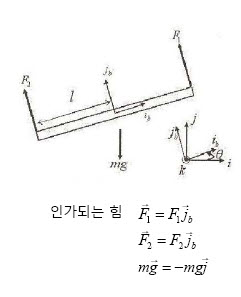
Two-Rotor 시스템은 양익 비행체의 수직이착륙 동작(Vertical Take Off and Landing)을 동역학으로 모델링 한 것을 양익의 장착각도를 0로-즉, 양 날개가 동체에 수직으로 연결되어있다고 가정한 모델입니다. 위 그림에서 F1, F2가 두 로터가 내는 양력이 되고, theta는 기울어진 각도가 됩니다. 인가되는 힘은 총 3가지로서 위에 제시된것과 같습니다.
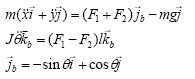
그 힘을을 수평방향, 기울어지는 각도, 동체 중심의 운동성분으로 각기 위와 같이 정리해볼 수 있습니다.
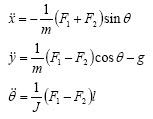
이를 x, y, theta에 관해 정리하면 위와같은 형태를 얻게 됩니다.
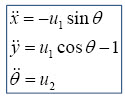
일반적인 시뮬레이션이라면, 다시 몇몇 파라미터를 간단히 두고 위와같이 표현할 수 있습니다. 실제 Two-Rotor는 딱 위의 동역학에 맞는 시스템을 실제로 만들어 내기가 어려우므로 그냥 시뮬레이션의 평이성을 위해 각 요소들을 적절히 맞춰서 위에서처럼 간단히 사용하면 되겠습니다.

위 그림을 MATLAB/Simulink로 시뮬레이션을 할 수 있도록 블럭을 꾸민것입니다.
 TwoRotorModel.mdl
TwoRotorModel.mdl추후 다시 이야기 하겠지만, 입력 1,2는 동역학방정식에 제시된 u1, u2이고 c1,c2는 파라미터 불확실성을 고려해서 만든것이므로, 필요없을때는 그냥 '0'을 인가하면됩니다. 그 아래 x_r, y_r은 레퍼런스 신호를 인가하는 곳으로 레귤레이션 문제에서는 역시 '0'을 인가하면 되겠습니다.
'The Robot > ControlTheory' 카테고리의 다른 글
| T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 (0) | 2009/07/20 |
|---|---|
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009/07/20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (10) | 2009/05/31 |
| 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 (2) | 2009/05/19 |
| 쿼드콥터(Quadcopter)의 동역학 방정식 (16) | 2009/05/19 |
| 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 (6) | 2009/05/19 |
| Two-Rotor (VTOL) 시스템의 동역학 모델 (6) | 2009/05/19 |
| 쿼드콥터 소개... (6) | 2009/04/20 |
설정
트랙백
http://pinkwink.kr/trackback/56


안녕하세요?
동역학 모델링 유도하신거 따라가면서 하나하나 공부 중인데요...
하나 궁금한게, ddot_y 우변에 F1-F2 가 어디서 온건지 쫌 막히는데요...
직관적으로 생각해 보면, 중력에 대해 수직방향 가속도 성분이라면 F1+F2일 껏 같은데,
혹시 오타가 아니면 제가 멀 잘 못 생각하고 있는건지, 확인차 여쭙습니다.
네 안녕하세요
오류가 맞네요.. 감사합니다.
ddot_y쪽에 F1+F2여야합니다.
그 아래 결과식은 u1=F1+F2로 두고
ddot_y = u1..... 어쩌고로 제대로 표기가 되어있네요.
안녕하세요,
안해도 될 질문을 했던 것 같네요, 시야가 좁아서요... 밑으로 내려 와서 보니 바로 답이 있었군요...
그런데, 또하나 궁금한거는 마지막 수식 정리하면서 ddot_y식의 마지막 항이, g가 1로 바뀐 이유는 머지요?
본문 중간에 있지만,
J, m, g 등등의 일반적 파라미터를 몰랐기 때문입니다.
동역학을 유도한 후 경향을 보고, 또 제어기도 설계해야하는데
실제 만들어진 기구부가 없기 때문에 파라미터들을 알 수가 없었죠.
그래서 파라미터들을 임의로 잡은 겁니다.
그래서 간략하게 대부분의 파라미터를 1로 본 것입니다.
안녕하세요. 내용이 정말 알차네요 ㅎ
근데 궁금한게 잇습니다.
마지막으로 정리된 식을 보면 ddot(x)=-u1sin세타 ddot(y)=u1cos세타-1 ddot(세타)=u2 이건데요.
여기서 x, y 가 일반적으로 아는 x축 y축 좌표를 의미하는건가요???
시뮬결과를 보면 초기값이 x=5, y=-5 인데 시간이 지나면 0으로 수렴하더라구요. 이 의미는 좌표상으로 (5,-5)에 잇다가 원점으로 돌아온다는 의미인가요???
x,y는 절대좌표계에서의 좌표입니다.
말씀하신데로 초기위치를 0이 아닌 곳으로 보고 제어기가 동작하면서 원점으로 이동하는 것이 시뮬레이션 결과입니다.