검색결과 리스트
글
요즘 벗꽃도 질려고 하고, 이제 봄도 끝날려고 하나봅니다. (힝.. 여러 사정으로 벗꽃 구경도 못했는데 말이죠...ㅠㅠ) 요즘 좀 재미난 작업을 몇개 진행 중인데요. 같이 일하는 연구원들한테 시킨거지만(^.^) 뭐 아무튼 그 일을 시킨건 저니까요.. ㅋㅋ. 하여간 플리퍼라는 아이가 달린 궤도형 주행로봇을 테스트 중입니다.
궤도형이라는게 장점이 크긴합니다만, 그래도 자기 한계라는게 있죠. 그걸 좀 더 극복하도록 도와주는 여러 장치들이 있습니다. 그중에서 플리퍼(Flipper)라고 부르는 아이를 장착한 모델이 있습니다. 그래서 계단이나 장애물을 좀 더 유용하게 극복할려는 거죠.

바로 저렇게 생겼습니다. 저런 앞에 달린 발같은 아이로 장애물을 극복해서 주행하는 거죠. 사실 위의 그림과 같은 궤도를 만드는 것도 실제로 만들어보면 쉽지 않습니다. 또, 플리퍼도 구현해보면 만드는 것 부터 쉬운 일이 아니죠. 그리고 나서.. 더 어려운건 움직이는거죠^^
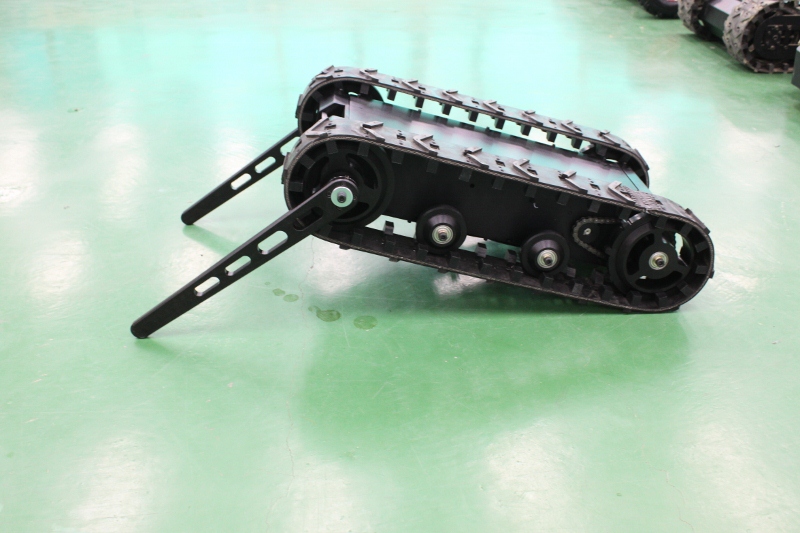
플리퍼로 저렇게 로봇의 각도를 조절해서 만약 카메라가 설치되어 있다면, 영상을 획득하는데 좀 더 도움을 줄 수도 있어요

저렇게 해서, 계단같은데 밀고 가서 장애물이나 계단에 올려놓을 수도 있는거죠.
나머지느 간단히 동영상으로 확인해 볼께요. 짧은 동영상이니 쉽게 구동을 확인하실 수 있습니다. 남은건 좀 더 강하게 만들고, 좀 더 빠르게, 그리고 위에다가 정찰용 키트나 로봇-암 같은걸 만들어 넣을거에요...
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| [연재] 3D 프린터란? - 정말 3D 프린터는 무엇인가? (26) | 2014/01/08 |
|---|---|
| 소형 재난용 정찰 로봇 AstroBoyS Flipper (10) | 2013/12/26 |
| 자동 발사 총을 장착한 군사형 주행 로봇 테스트 (20) | 2013/07/02 |
| 플리퍼(Flipper)가 달린 궤도(Track)형 주행로봇 (24) | 2013/04/23 |
| 험난한 지형에서 주행가능한 모바일 플랫폼 테스트 (24) | 2013/04/10 |
| 대형 메카넘 플랫폼 Mecanum Platform (24) | 2013/01/08 |
| 로봇의 자율주행. 그리고 무인 전기 자동차 (28) | 2012/11/07 |
| 로터리 역진자 시스템 Rotary Inverted Pendulum (16) | 2012/09/04 |
설정
트랙백
http://pinkwink.kr/trackback/549


아이들에게 보여주었는데... 계단 올라가는 순간... 탄성이....
아이쿠 감솨합니다. 좀더 좋은 성능을 탑재해야죠 ㅋㅋ
와우.. 로봇 멋진데요~
탱크 발통만 있는것 같네요 ㅋ
아직 상단에 올라갈 기능은 구현을 안했거든요
혹시 KIST 연구원이신가요?
아니요. 인천에 있는 작은 로봇 회사에서 입사한지 겨우 3년차인 연구원이랍니다 ㅎㅎ
대단한 무기가 되겠네요
아직도 많이 남았어요. 열심히 재미있게 해야죠 ㅎㅎ
실제로 활용되면 좋겠어요. 장애인들에게도 희망이 될 수 있을 수 있겠는데요
네 감사합니다. 열심히 해볼게용 ㅋㅋ
오호...올라가는 모습이 정말 신기합니다..
바퀴가 제대로 기능을 발휘하는 것 같은데요
네 동영상이라 약간 잘 보인것도 있죠. 좀 더 부드러운 움직임을 구현해야하는 과제가 남아있어요^^
정말 신기하네요~ ^^
덕분에 잘 보고 갑니다~
네~~ 감사합니다.^^
너무 신기해보인다는..ㅎㅎ
행복하고 즐건 하루 보내시길 바래요^^
아하.. 넵.. 감사합니당^^
덕분에 잘 보고 간답니다~
행복하고 즐건 하루 되시길 바래요~
ㅎㅎ 네 감사합니당^^
좋은 포스팅 잘보고갑니다^^
오늘 하루도 마무리 잘하시고, 좋은 저녁 되세요^^
넹.. 감솨합니다^^
플리퍼는 자동인가요? 수동조작인가요?
현재는 RC로 조종중이니 수동이죠^^
좀 더 있다가 어떻게 잘 기능을 올려야죠 ㅎㅎ^^
플리퍼 이용해 보려고 합니다. 모터의 종류 알 수 있을까요?
그냥 한 100W급 일반 DC모터입니다. 아직은 완전히 fix되지 않았습니다. 테스트중이거든요.