검색결과 리스트
글
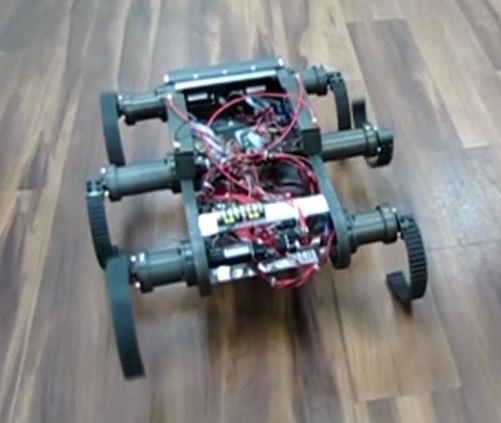
최근 제가 일하는 연구소에서 RHex[관련글]라는 로봇을 만들고 있다[관련글]는 이야기를 했는데요. 그리고, 여러가지 설계상의 오류로 모터의 최종속도가 너무 느려 걸음마단계긴 하지만, 직선 주행만 느리게 하던 모습을 그 후 소개했습니다.[관련글] 그리고, 저 말고(^^) 저희 연구원들은 계속 업그레이드를 다른 업무와 함께 틈틈이 진행을 했는데요.

이번에는 그걸 소개할려고 합니다.

일단 지난번 처럼 직선 중행도 되면서, 후진도 되도록 했구요.

후진이야.. 뭐 손쉽게 가능합니다만^^
특히나 이번에는 회전도 되도록 했습니다.
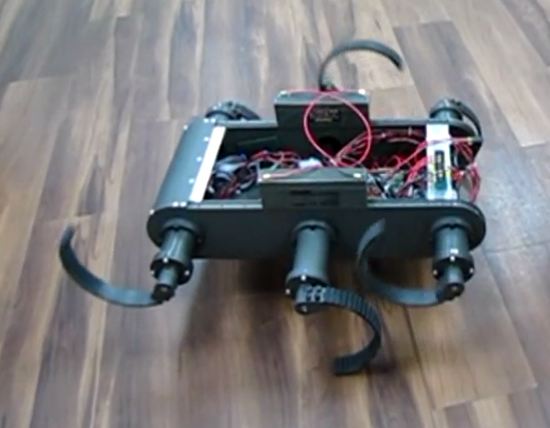
좌우회전이 그리 만만한 작업은 아니더라구요^^

물론 장애물을 넘어줘야 RHex라고 할 수 있지요...^^. 저 크기의 로봇에 일반적인 바퀴를 달면 넘을 수 없는 장애물을 넘는 모습입니다.

이렇게 넘어가는 거지요. 물론 장애물을 넘을때 좀 우스꽝스럽긴 해요^^
아 그리고, 종료기능도 넣었습니다.
이제 2차 버젼을 시작해야죠. 1차 버젼에서 발견된 오류들을 수정하고, 설계에 반영해야하니까요. 언제하냐구요? 돈 생기면 해야죠...ㅠㅠ
동영상 보여드릴께요^^
이번에는 그걸 소개할려고 합니다.
일단 지난번 처럼 직선 중행도 되면서, 후진도 되도록 했구요.
후진이야.. 뭐 손쉽게 가능합니다만^^
특히나 이번에는 회전도 되도록 했습니다.
좌우회전이 그리 만만한 작업은 아니더라구요^^
물론 장애물을 넘어줘야 RHex라고 할 수 있지요...^^. 저 크기의 로봇에 일반적인 바퀴를 달면 넘을 수 없는 장애물을 넘는 모습입니다.
이렇게 넘어가는 거지요. 물론 장애물을 넘을때 좀 우스꽝스럽긴 해요^^
아 그리고, 종료기능도 넣었습니다.
이제 2차 버젼을 시작해야죠. 1차 버젼에서 발견된 오류들을 수정하고, 설계에 반영해야하니까요. 언제하냐구요? 돈 생기면 해야죠...ㅠㅠ
동영상 보여드릴께요^^
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| 무인탑승형 로봇. 전기차. 테스트중 (12) | 2012/04/03 |
|---|---|
| 무인 탑승형 로봇. 개발 중. 조향장치 서보 제어 (18) | 2012/03/08 |
| 실외 탑승형 로봇. 무인 자율 주행 전기차를 테스트 중이에요^^ (20) | 2012/02/29 |
| RHex 로봇 테스트 버젼 - 기능 업그레이드 (20) | 2012/01/14 |
| 스케이트 보드 로봇이 제품으로 출시 되었습니다. (16) | 2012/01/06 |
| RHex 로봇... 테스트 버젼 (12) | 2011/12/08 |
| 좀 큰 밸런싱 로봇 두번째 - 손따라 다니기 - (22) | 2011/10/24 |
| 메카넘휠을 이용한 AGV - 라인트레이서 (12) | 2011/10/07 |
설정
트랙백
http://pinkwink.kr/trackback/500


기능이 점점 늘어나고 있네요.
거대한 딱정벌레나 풍뎅이 같습니다. ^^
네.. 좀 무겁긴 하지만요.. ㅎㅎㅎ
음...아직 머 테스트 버전이니까....ㅎㅎ 제자리에서 방향전환도 가능하군요.
장애물도 척척 넘어가네요.....갑자기 리얼스틸이 보고 싶어졌다는~ ^^
그나저나 솔로부대 영원히 제대 안하시면 어쩌시려고. 봵~ ^^....
행복한 주말 되세요. ㅎㅎ
솔로부대... 제대 오랫동안 안하면
국가에서 뭐 포상금 이런거 안나올까요?^^
그럴리는 없지만 말이죠^^
보실 때마다 부듯하시겠습니다.
토성에는 언제 진출할 계획입니까?....^^
일단 지구부터 탐험해야할것 같아요^^
산, 바위, 갯벌, 사막,숲 등등 말이죠^^
놀라운데요,,, 장애자들을 위한 의료기기로 활용되면 너무 좋겠어요
음. 그런 용도도 있을까요?? ^^
일단 무쟈게 잘 움직이게 해야죠
좋은 주말 보내세요^^
우주보다는 조금은 저렴(?)하게 심해로 진출하시는건 어떨까요?
그런데 동영상을 보니..
한복입혀 놓으면(?) 한풀이 춤 추는 것 같은 느낌이 들 것 같아요!
ㅎㅎ 얘가 구조상 좀 허우적 거리는 느낌이 강하긴 하죠.. ㅋㅋㅋㅋ
다리를 한 바퀴씩 돌리면서 움직이는 게 인상적이네요.
박스 장애물도 잘 넘으니
개발하시는 보람이 점점 더 커지시겠는 걸요.
네... 더 잘되어야할텐데 말이죠^^
동영상을 보니 의외로 크기가 크네요 ^^ 다음 포스팅 기대됩니다. ^^
네. 좀 더 많은 기능을 넣어야죠^^
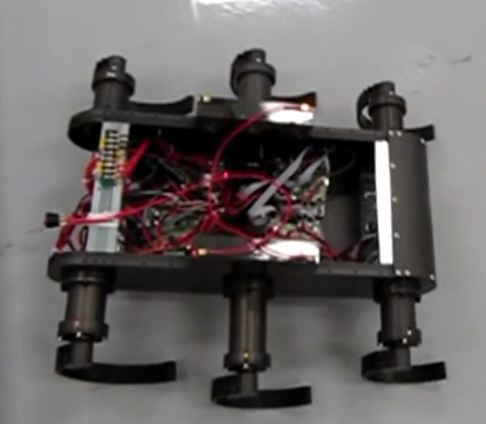
바퀴가 반이 잘리면 올라가는 효과가 있군요.
왜? 둥그렇게 않했을까~ 했습니다.
대신에 안정적인 주행은 버려야겠네요~
다 장단이 있네요~
노펫
네 그 간단한 변형으로 효과를 좀 노리는거죠^^
안녕하십니까? 창원대학교 자동제어실험실 손재환 입니다. 저희도 Rhex 로봇을 만들고 있는데, 다리 모형을 주문제작을 하려고 하는데 업체를 아직 못찾았습니다. 그래서 혹시 다리를 주문제작하셨으면 업체를 가르쳐주실 수 있으십니까?
그때가 꽤 되어서 잘 모릅니다. 거의 우리가 직접 가공하다시피 했으니까요.
RHex의 다리는 최대한 가볍게 만들어야합니다. 안그러면 속도와 힘을 보장받기 어렵습니다.^^
안녕하세요 한기대 DSP랩에 권순욱이라고 합니다. 저희도 졸업작품으로 Rhex로봇을 만들려고하는데 지금 저 작품에 사용하신 모터 사양을 알수 있을까요?
Maxon 모터의 250W급이었습니다. 사실 출력은 과하게 잡힌겁니다. RPM 때문에 어쩔 수 없었던 선택이었지요. 지금 생각하면 몸체의 무게를 줄이고, 모터 출력을 더 낮춰도 충분했는데 말이죠.ㅠㅠ