검색결과 리스트
글
첨부되어있는 pdf화일은 제가 석사1년차일때 국제학술대회에 발표했던 내용입니다. 몹시 부족하고 어리버리한 수준이지만, 향후 전개할 쿼드콥터(quadcopter)의 제어기를 이 방법으로 할까 하고 미리 소개합니다. 본래 논문에서 제가 제시했던 방법말고, 제가 비교하고자 했던 방법으로 전개할 거라 본문내용중 2.3절에 해당하는 내용입니다.
어떤 비선형시스템을 위와 같이 표현할 수 있다고 하겠습니다.
여기서 에타(eta)는 시스템의 상태와 제어입력을 포함한 상태벡터라고 하겠습니다.
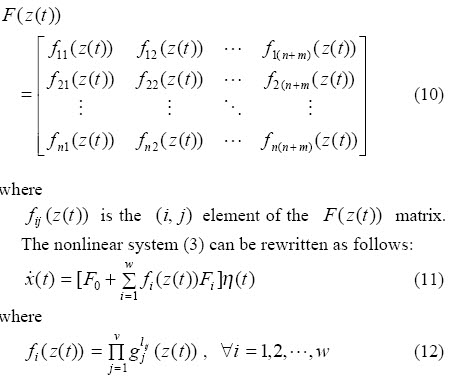
위의 11번 수식에서 F0는 상수행렬입니다. 그리고 선형독립인 함수 g를 잡아 f를 계산합니다.
위 식처럼 본래 비선형시스템을 표현할 수 있습니다.
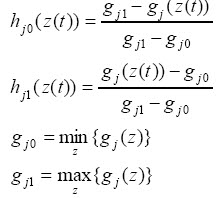
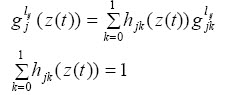
이걸 다시 소속정도를 나타내는 h라는 함수로 표현을 했습니다.
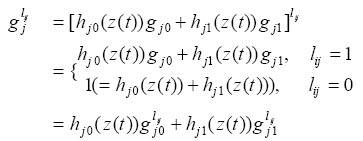

우리의 최종목적은 위 수식으로 표현하는 것이고

그 A. B 행렬들을 만들어내면 원래 비선형 시스템을 등가인 선형시스템으로 표현할 수 있게 되는 것입니다.
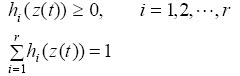
여기서 h의 합이 1이라는 것은 꽤 중요한 의미를 가집니다. 실제 제어기를 구현할 때 h의 합이 1이 되는지만 체크해도 꽤 많은 에러를 잡을 수 있습니다.
위의 간단한 예제에 한번 적용해 보겠습니다.
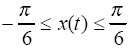
작동범위를 설정하구요
선형독립인 함수 f1,f2를 설정했습니다.
이 Ai, Bi는 선형독립인 함수를 2개 설정해서 2의 2승으로 4개의 퍼지규칙이 생성됩니다.
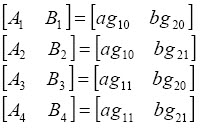
바로 위와 같이 생성되는 거죠
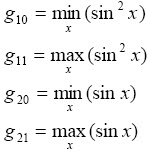
그 각 g함수들입니다.
간단한 예제를 통해 보았듯이 T-S 퍼지 시스템은 비선형시스템을 등가인 선형시스템의 조합으로 표현할 수 있게 되어, 각 선형시스템에 맞는 선형제어기들을 설계할 수 있게 됩니다.
 final.pdf
final.pdf위 화일은 창피하긴 하지만 당시 발표했던 논문의 전문입니다.
'The Robot > Reference' 카테고리의 다른 글
| 1차 상보필터와 Wheeled Mobile Robot에 관한 논문 (4) | 2010/12/03 |
|---|---|
| Complementary Filter 공부에 도움이 되는 논문 (12) | 2010/08/24 |
| 부유체 위에 고정된 크레인의 안정화 제어기 설계에 관한 연구 (2) | 2010/07/26 |
| 자이로센서와 가속도센서를 이용한 각도추정 필터에 관한 논문 소개 (8) | 2010/07/22 |
| MATLAB을 익히는데 도움을 주는 블로그 (12) | 2010/07/20 |
| Strapdown system과 Stable Platform System (0) | 2009/11/16 |
| 기계식 가속도센서의 원리 (8) | 2009/11/05 |
| T-S Fuzzy Modeling (2) | 2009/07/07 |
설정
트랙백
http://pinkwink.kr/trackback/98


비밀댓글입니다
우와... 저는 비록... 강의하고 있지만...
사실 강의하면서 배운다는것이 더 맞는 말이겠지요...
대단하십니다^^
그..근데...학번이...어마어마...어..어르신이라는^^
방갑습니다..많이...
요즘... 사실은 졸업문제와 취업문제로 강의에 그렇게 공을 들이지 못해.. 항상 학생들에게 미안한 마음뿐입니다.ㅜ.ㅜ