검색결과 리스트
글
제가 11월22일부터 27일까지 태국-푸켓의 학회에 다녀왔다는 이야기를 드렸었는데요. 거기서 발표한 논문입니다. 뭐 대단한건 아니구요. -그러니까 학술대회에서 발표했다는..뭐.. 그런 변명도 있고.. ㅠㅠ... 하여간 이번에 참석한 학회는
IASTED Technology and Management Conferences 2010 입니다.
사실... 그렇게 유명한 학회도 아니고, 또 분위기가 학구적인 학회도 아닙니다. 그래서 영어에 자신이 없는 분들에게는 유리할 수도.. ㅎㅎㅎ.. 질문이 많이 없거든요..ㅠㅠ... 뭐 하여간...
이번 학회에서는 두 편의 논문이 개제되었는데요. 먼저하나는 [관련글]에서 소개한 1차 상보필터와 [관련글]에서 소개한 2차 상보필터를 둘다 모두 최소자승법으로 설계해서 성능을 비교해본 것입니다. 동작주파수가 대략 1Hz 근방의 펜들럼이나 밸런싱로봇의 경우 1차든 2차든 성능의 차이가 없더군요. 상보필터의 사용목적이 짧은시간동안 동작하는 모바일로봇인 경우 상대적으로 간단한 1차 상보필터 (물론 최소자승법으로 설계된) 가 유리할 수도 있다는 내용입니다.
그 다음 발표 내용은 한 때 제가 내용을 잘못올려서 큰 사과문을 적었던 밸런싱로봇[관련글]입니다. 그 이후 다시 연재한 밸런싱로봇이 아니라 최초버젼의 밸런싱로봇을 이제야 논문으로 소개한 것이죠. 이 로봇이 처음 만들어 진게 2008년이니 무려 3년만에 논문으로 소개할 생각을 했으니 저도 참 게으릅니다..ㅠㅠ
아.. 발표자는 제 후배들입니다..ㅎㅎ 그래서 상대적으로 편안한 학회였지요^^
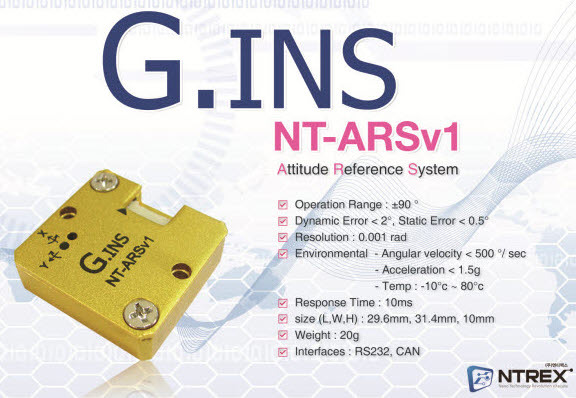
| NT-ARSv1 (각도 측정, 자이로 센서 가속도 센서 이용, ARS, IMU) |
자이로 센서와 가속도 센서를 이용한 각도 측정의 어려움을 해결할 수 있는 ARS모듈로 낮은 가격과 작은 크기를 가지며, 금속 케이스가 있어 활용도가 높음. NT-ARSv1 : 관련페이지
'The Robot > Reference' 카테고리의 다른 글
| 뱀 로봇을 만드는 Gavin Miller 박사 (14) | 2011/01/24 |
|---|---|
| 밸런싱로봇의 트래킹 문제에 대한 해법과 상보필터의 설계시 보정용 센서의 선택 문제에 대한 논문 (4) | 2011/01/02 |
| 밸런싱 로봇에 관한 논문 (10) | 2010/12/04 |
| 1차 상보필터와 Wheeled Mobile Robot에 관한 논문 (4) | 2010/12/03 |
| Complementary Filter 공부에 도움이 되는 논문 (12) | 2010/08/24 |
| 부유체 위에 고정된 크레인의 안정화 제어기 설계에 관한 연구 (2) | 2010/07/26 |
| 자이로센서와 가속도센서를 이용한 각도추정 필터에 관한 논문 소개 (8) | 2010/07/22 |
| MATLAB을 익히는데 도움을 주는 블로그 (12) | 2010/07/20 |
설정
트랙백
http://pinkwink.kr/trackback/386


옹.. 학회..
전 푸켓으로 신혼여행을 다녀왔지요. ㅎㅎㅎ
오호... 아름다운 신혼여행이셨겠는데요^^
따끈따끈한 논문 축하드립니다..
핫... 감사합니다.^^