검색결과 리스트
글
작년 2009년 10월부터 12월까지 딸랑 3개월간 카이스트의 모바일 하버 사업안에서 파도에 의해 흔들리는 배 위에서 크레인을 어떻게 안정화할 것인지에 관한 연구를 수행했었습니다. 당시 지원된 연구결과로 2010년 올해 2월경 논문을 투고 했는데요. 이제사 개제확정이 되었네요.
부유체 위에 고정된 크레인의 안정화 제어기 설계에 관한 연구
Journal of Institute of Control, Robotics and Systems (2010) 16(8): 727-734
DOI 10.5302/J.ICROS.2010.16.8.727
ISSN 1976-5622
A Study of Anti Control for a Ship-mounted Container Crane
Journal of Institute of Control, Robotics and Systems (2010) 16(8): 727-734
DOI 10.5302/J.ICROS.2010.16.8.727
ISSN 1976-5622
A Study of Anti Control for a Ship-mounted Container Crane
실제 실험도 하지 못하고 이론상으로만 (3개월의 연구수행기간은 너~무 짧았지요...ㅠㅠ) 논문을 작성했네요...
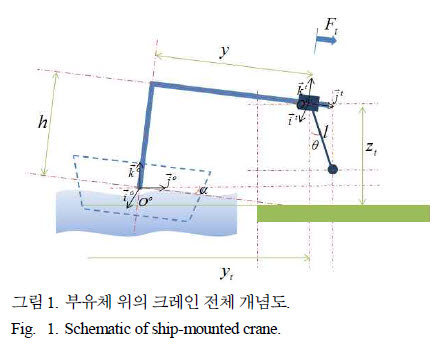
위와 같은 부유체 위의 크레인에 대해
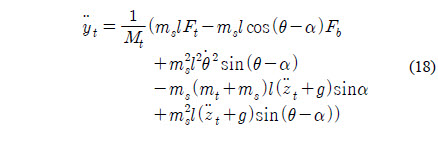

전체 동역학을 유도했었지요. 그리고
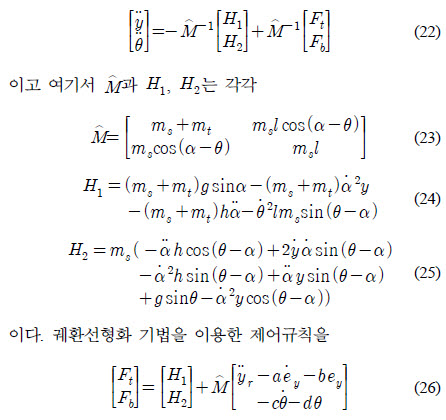
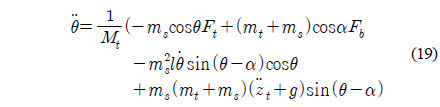
궤환선형화기법이라는 방법으로 제어기를 설계하고, 다시
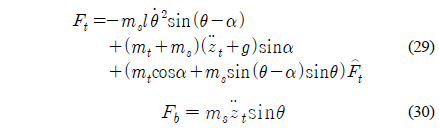
F_t와 F_b를 위와 같이 잡고
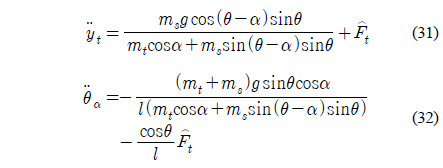

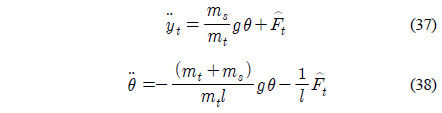
위 과정을 통해, 시스템 전체가 간단한 선형제어기설계가 가능하다는 것을 밝혔습니다. 아쉬운것은 만약 제가 (그리고 우리가) 좀 더 부지런했었다면, 현재 카이스트가 생각하는 ZMP 방식의 크레인과 지금의 논문에서 이야기하는 추가 제어력 방식에 대한 실제 비교를 수행해서 성능을 한번 테스트해 해보았으면 하는 아쉬움이 남습니다. 더불어 더 나아가서는 새로운 제어기의 설계를 위해 동역학을 간편히 할려고 줄길이의 변화는 생각하지 않았는데, 거기서도 아쉬움이 남습니다. 이래저래 상당히 아쉬운 작업이었네요...ㅠㅠ
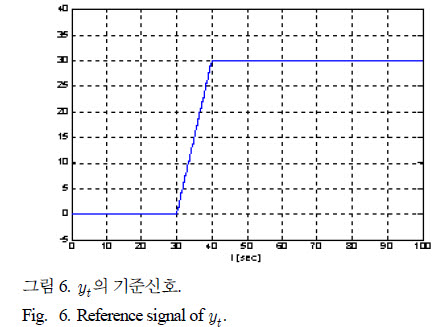
하여간, 트롤리의 수평거리에 대한 기준입력을 주고
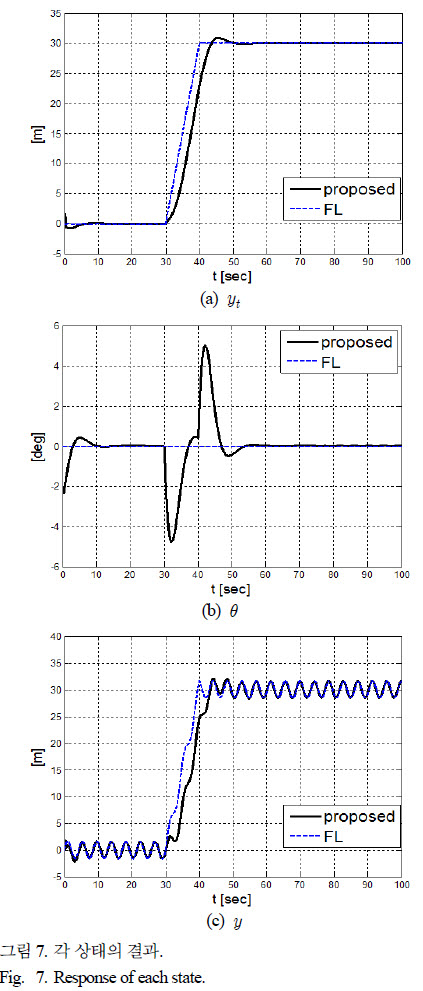
일반적으로 비선형 시스템에 많이 사용하는 궤환선형화기법과 이번 연구에서 이야기한 방법을 비교해 보았습니다.
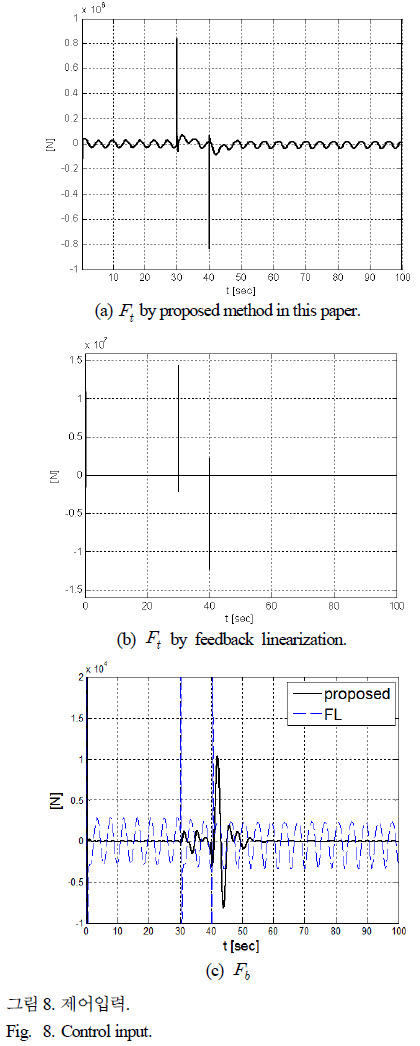
사실.. 저희 연구의 가장 큰 장점은 궤환선형화기법에 비해, 추가제어력이 상당히 적게 나온다는 것과 필요할때(??)만 생성된다는 장점을 가지지요... (뭐 그래도. 아까 말씀드린데로... 아쉬움이 남는것은 어쩔 수가 없습니다.. ㅠㅠ)
| NT-ARSv1 (각도 측정, 자이로 센서 가속도 센서 이용, ARS, IMU) |
자이로 센서와 가속도 센서를 이용한 각도 측정의 어려움을 해결할 수 있는 ARS모듈로 낮은 가격과 작은 크기를 가지며, 금속 케이스가 있어 활용도가 높음. NT-ARSv1 : 관련페이지
'The Robot > Reference' 카테고리의 다른 글
| 밸런싱 로봇에 관한 논문 (10) | 2010/12/04 |
|---|---|
| 1차 상보필터와 Wheeled Mobile Robot에 관한 논문 (4) | 2010/12/03 |
| Complementary Filter 공부에 도움이 되는 논문 (12) | 2010/08/24 |
| 부유체 위에 고정된 크레인의 안정화 제어기 설계에 관한 연구 (2) | 2010/07/26 |
| 자이로센서와 가속도센서를 이용한 각도추정 필터에 관한 논문 소개 (8) | 2010/07/22 |
| MATLAB을 익히는데 도움을 주는 블로그 (12) | 2010/07/20 |
| Strapdown system과 Stable Platform System (0) | 2009/11/16 |
| 기계식 가속도센서의 원리 (8) | 2009/11/05 |
설정
트랙백
http://pinkwink.kr/trackback/352


게재 확정 축하드립니다.
네 감사합니다. 짧은기간의 연구였지만, 짧은 만큼 아쉬움도 많이 남은 주제였던것 같습니다. 뭔가 좀 더 할 수 있었을 부분도 있는데, 워낙 머리가 나쁘고, 천성이 게을러 결국 아쉬움만을 정말 남겨버렸네요...ㅠㅠ