검색결과 리스트
글
| IMU (Inertial Measurement Unit)! |
Inertial Navigation 이라는 것은 회전각속도(gyro)계와 직선 가속도계(accelerometer)를 이용해서 회전각(orientation)과 위치(position)을 검출하는 기술을 이야기합니다. 여기서 확장해서 공간상의 3축 직교좌표계에 대해 검출하는 것을 특별히 IMU (Inertial Measurement Unit) 이라고 합니다. 이 IMU는 크게 두가지로 나눠지는데요.
그것이 Stable Platform System과 Strapdown System입니다. 아 그리고 미리 말씀드리는데 흔히들 말씀하시는 각종 적분에러(드리프트오차)나 여러 외란으로 인한 필터의 설계는 이 이야기와는 다른 이야기입니다. 이 분류는 단시 Gimbal이라고 부르는 장비의 유무에 대한 이야기로서 필터는 그 다음 이야기입니다.
| Stable Platform System ! |
Stable Platform System이라는 것은 아래 그림처럼
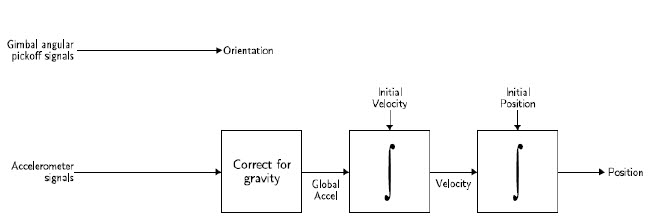
각속도 센서는 무조건 회전각도를 검출하고, 가속도계는 두번 적분을 통해 위치를 검출하도록 하는 것입니다. 그렇다면 의문이 하나 들지요. 회전하면서 병진운동을 같이 하는 물체에서 검출되는 각속도 성분은 접선, 법선 방향의 가속도성분[[공학기초/Theory] - [공업수학] 벡터의 미적분 - 접선과 가속도]이 포함되면서 단순히 두번적분만으로는 그 위치를 정확히 알 수 없을 것이라는 거죠. 그래서 특별히 뭔가 장치가 하나 필요합니다.
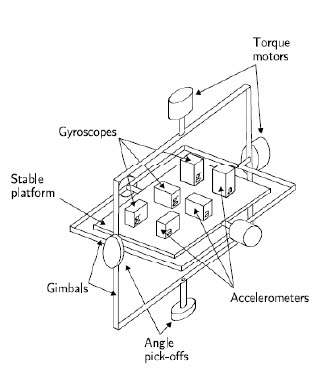
바로 위에서 보이는 Gimbal이라는 기계적 장치입니다. 저 장치가 쉽게말하면 가속도계의 x축을 항상 주행방향으로 만들어줍니다. 그렇다면, 왜 저런 복잡한 장비가 필요했을까요. 그건 예전엔 컴퓨터의 성능이 몹시 않좋았기 때문이라고 말할 수 있습니다. 즉, 위 장비가 가지는 불리함(과도구간에서의 해석의 불가능, 기계적 구현 자체의 어려움 등등)에도 불구하고 실질적인 계산을 단순화하고자하는 것에 이유가 있습니다. 그러나 요즘처럼 계산능력이 micro 혹은 nano second에 있는 프로세서가 일반화된 요즘은 저와 같은 복잡한 기구부를 사용하지 않습니다.
| Strapdown System! |
바로
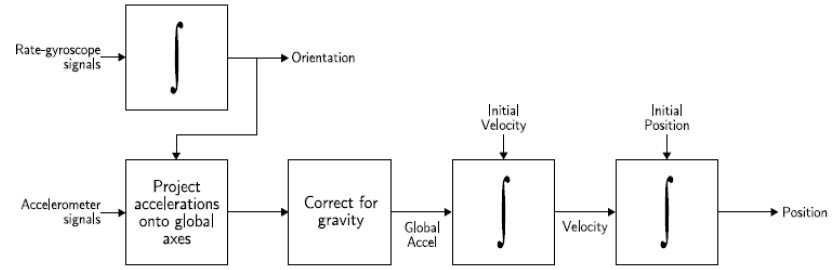
위와 같이 그냥 간단히 하나의 보드? 장비? 여하튼 가속도계 자이로를 같이 묶어두고(strap) 각속도와 회전각속도를 모두 고려해서 직선방향의 위치와 자세를 계산하겠다는 것이 Strapdown System입니다.
본 글은 August 2007에 Cambridge 대학에서 발표된 Oliver J. Woodman이라는 분의 An introduction to inertial navigation이라는 제목의 Technical Report. Num. 696을 참조한것입니다.
| NT-ARSv1 (각도 측정, 자이로 센서 가속도 센서 이용, ARS, IMU) |
자이로 센서와 가속도 센서를 이용한 각도 측정의 어려움을 해결할 수 있는 ARS모듈로 낮은 가격과 작은 크기를 가지며, 금속 케이스가 있어 활용도가 높음. NT-ARSv1 : 관련페이지
'The Robot > Reference' 카테고리의 다른 글
| 1차 상보필터와 Wheeled Mobile Robot에 관한 논문 (4) | 2010/12/03 |
|---|---|
| Complementary Filter 공부에 도움이 되는 논문 (12) | 2010/08/24 |
| 부유체 위에 고정된 크레인의 안정화 제어기 설계에 관한 연구 (2) | 2010/07/26 |
| 자이로센서와 가속도센서를 이용한 각도추정 필터에 관한 논문 소개 (8) | 2010/07/22 |
| MATLAB을 익히는데 도움을 주는 블로그 (12) | 2010/07/20 |
| Strapdown system과 Stable Platform System (0) | 2009/11/16 |
| 기계식 가속도센서의 원리 (8) | 2009/11/05 |
| T-S Fuzzy Modeling (2) | 2009/07/07 |
설정
트랙백
http://pinkwink.kr/trackback/220

