검색결과 리스트
글
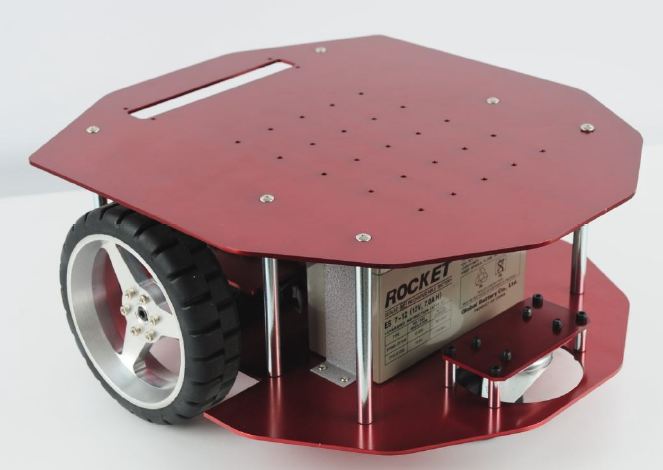
모바일 로봇 / 플랫폼인 STELLA B1을 출시했었는데요[관련글], 그 후, 오픈 로보틱스 카페[바로가기]의 피드백과 저희 내부적인 결정등을 이유로 펌웨어 업데이트를 단행했습니다. 그리고, STELLA B2로 업그레이드 버젼을 내놓게 되었네요.
흠 일단 가장 달라진 기능은
1. CAN통신도 같이 지원한다는 것입니다.
2. 그리고, 속도지령이 단일 모터만 내릴 수 있던 것을, 한 번에 두 모터 모두에 대응할 수 있도록 했습니다. 또한,
3. 펌웨어 버젼을 질의하고 읽어오는 명령이 추가되었습니다.
4. 그리고, 엔코더 자체의 현재값을 읽어오도록 되어있습니다.
5. 마지막으로, 현재 위치 상태를 얻어오는 GPOSITION 명령의 해상도를 10mm단위에서 1mm단위로 올렸습니다.
기존의 STELLA B1을 구입하셨던분들은 펌웨어를 업데이트하셔야하는데요.
 Stella B2 업그레이드 방법.pdf
Stella B2 업그레이드 방법.pdf를 참조하시면 됩니다.
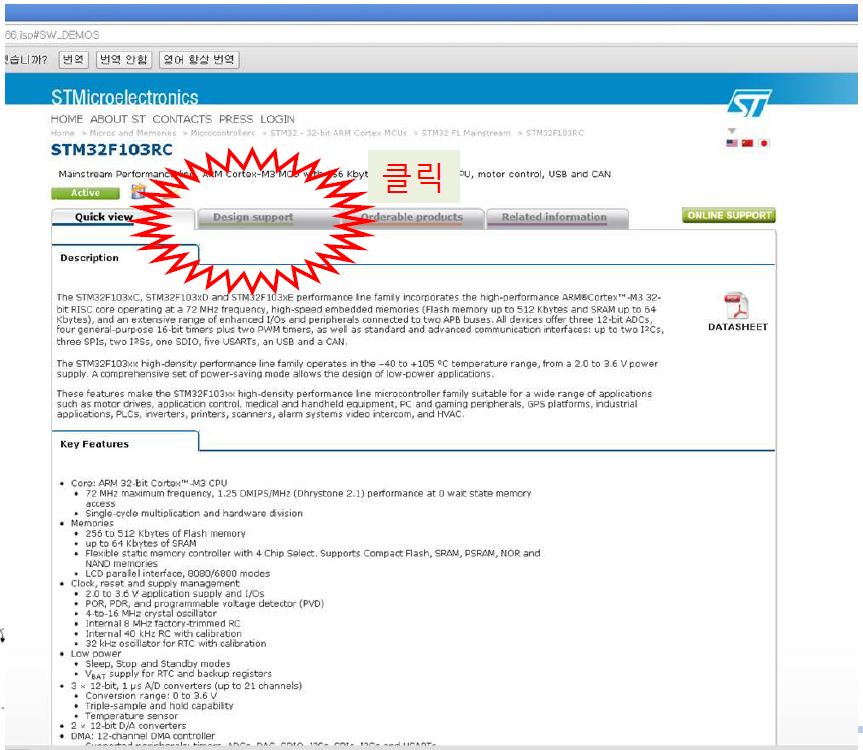
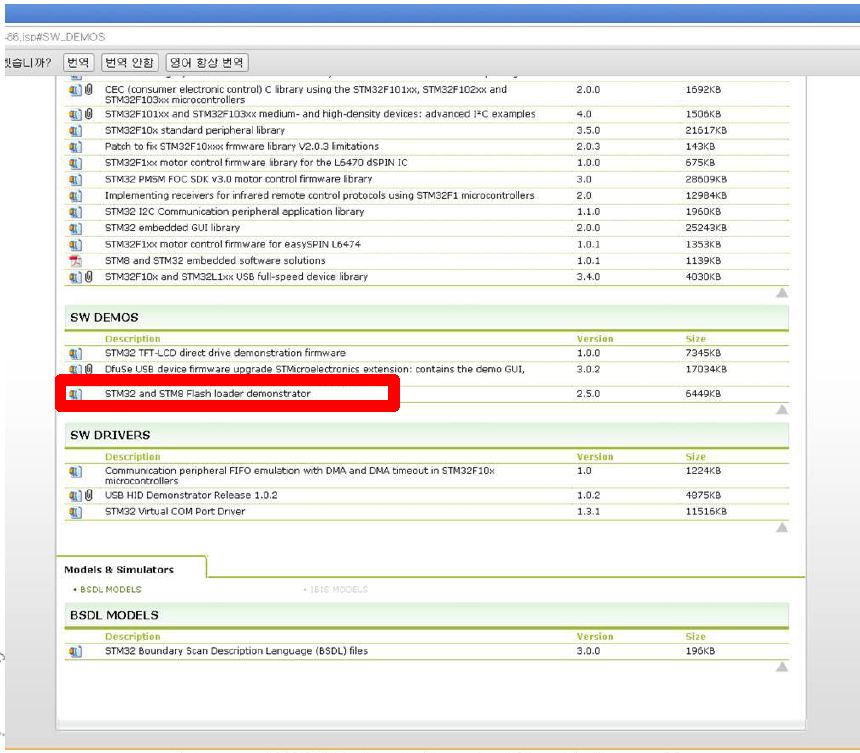
STM사이트에서 다운로드관련 프로그램을 다운받으시고
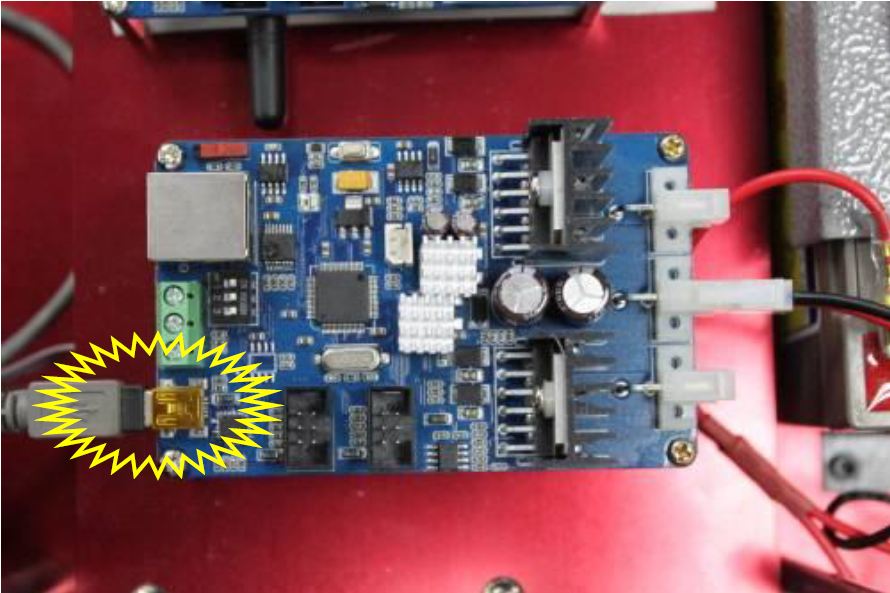
USB케이블과 PC를 연결..후

스위치를 저 위치에서 오른쪽으로 하시고, 리셋하시공
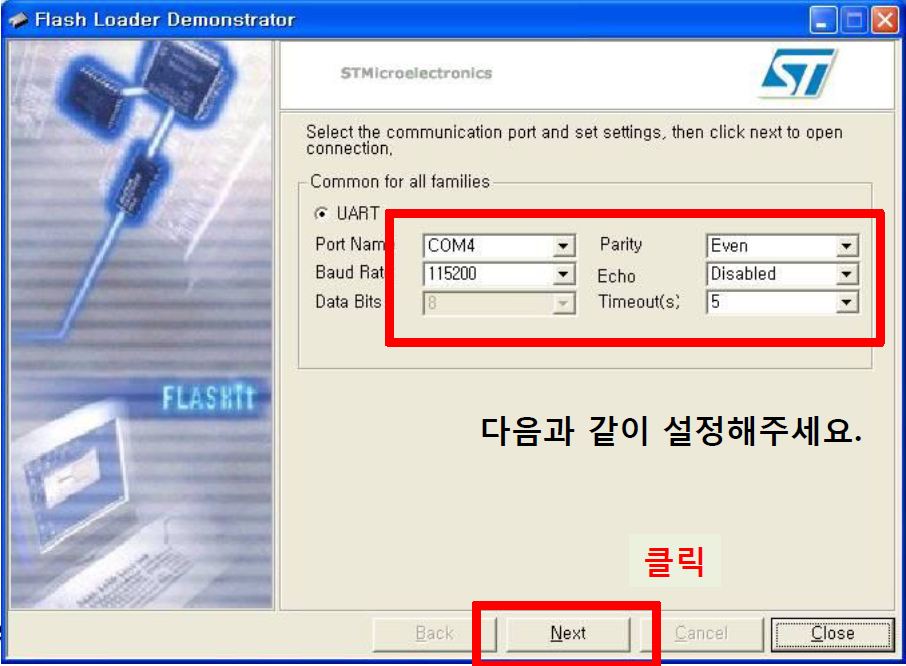
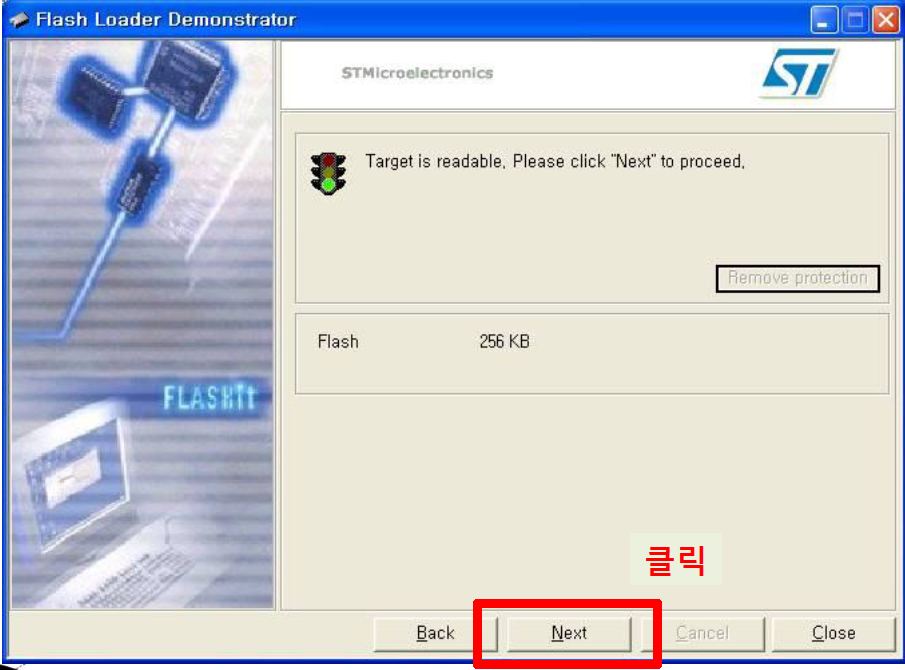
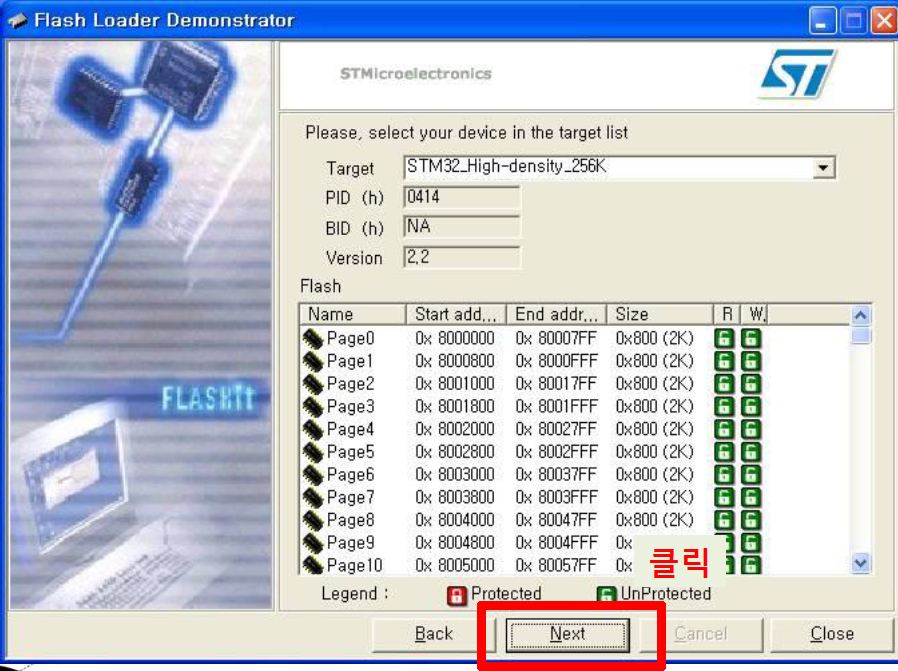
Flash Loader에서 COM포트를 잡으시고
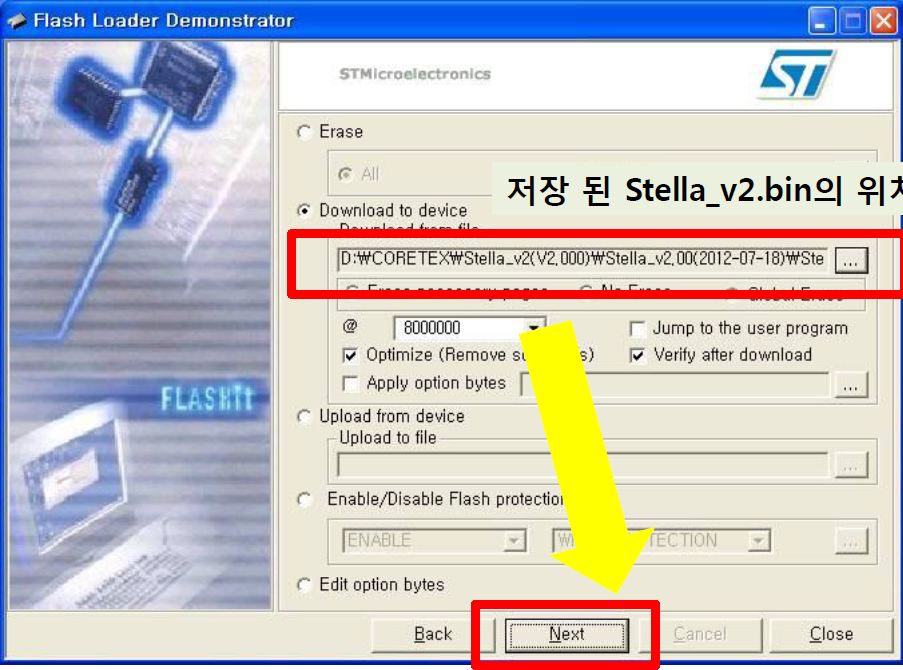
 Stella_v2.bin
Stella_v2.bin위 화일을 로드하시면 됩니다.
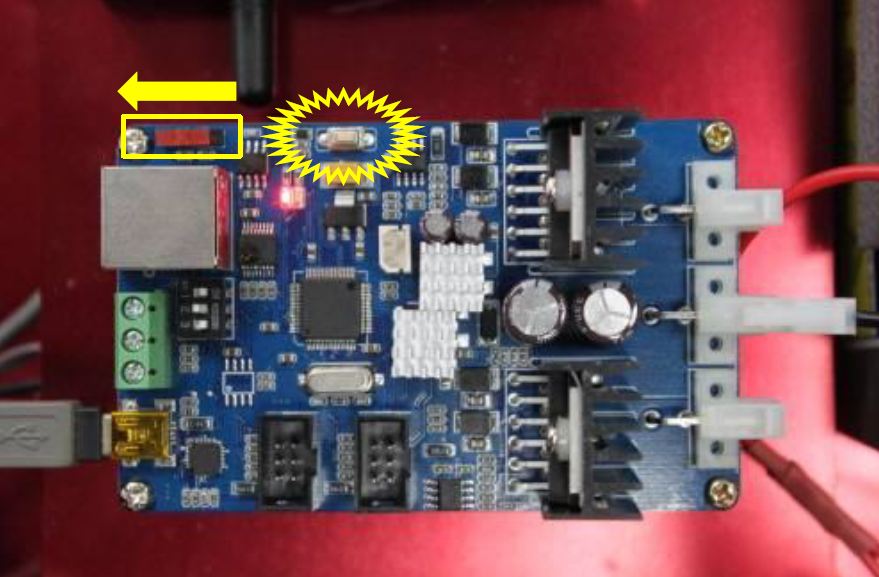
그리고, 스위치를 위그림처럼 하시고, 리셋한번 더 하시면 됩니다.
스텔라 B2의 메뉴얼을 위에 있습니다. 디바이스마트의 판매페이지는 [바로가기]입니다.
마지막으로, STELLA B2를 이용해서, 두 대의 로봇을 움직이는 모습을 담은 동영상도 같이 보시죠^^
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| 로봇의 자율주행. 그리고 무인 전기 자동차 (28) | 2012/11/07 |
|---|---|
| 로터리 역진자 시스템 Rotary Inverted Pendulum (16) | 2012/09/04 |
| 위험물 제거 로봇. 무반동 물 분사기 장착형 (30) | 2012/08/17 |
| 모바일 로봇 / 모바일 플랫폼 - STELLA B2 (20) | 2012/08/10 |
| 모바일 플랫폼/모바일 로봇 STELLA의 주행 명령 테스트 (22) | 2012/06/01 |
| 모바일 로봇 / 모바일 플랫폼 - STELLA B1 (24) | 2012/05/21 |
| 모바일 로봇 / 모바일 플랫폼 테스트 中 (12) | 2012/04/05 |
| 무인탑승형 로봇. 전기차. 테스트중 (12) | 2012/04/03 |
설정
트랙백
http://pinkwink.kr/trackback/531


멋집니다 ㅎ
잘 보구 가요^^
네 좋은 한 주 보내세요
펌웨어 업그레이드로 더욱 안전작인 작동이 되겠군요.
그러길 기대하는거죠^^ 그러나 한번에 잘 안되더라구요^^
행복하고 즐거운 주말 되시길 바래요~
네.. 주말은 지나버렸네요. 좋은 한 주 보내세요^^
잘 보구 가요^^
네.. 감사합니다.
비밀댓글입니다
넵.. 화이팅입니다.^^
멋진 발명품입니다... 대단하단 말을 하고 싶습니다.
좋은 제품을 많이 만들고 싶어용^^
아이들이 점점 스마트해진다는 느낌입니다.
얼릉 이 아이들을 데리고 결실을 맺으셔야 할텐데......
제기 뭐 도울 일이라도 ^^;;
히히 응원부탁드립니당...^^
오~~ 신기신기~~
^^
우와.. 1mm 오차라니 정말 고생 많으셨겠어요
앗.. 오차가 1mm라기 보다는 그냥 피드백 해상도가 1mm라는 거죠. ㅎㅎㅎ^^
혹시 스텔라B2 모델에 사용된 모터와 엔코더 관련 회로나 결선방법 같은 정보를 알 수 있을까요?
디바이스마트의 판매페이지에 아마 모터와 엔코더에 대한 언급이 있을겁니다. 모터는 DC를 사용하고, 엔코더도 일반적인 로터리 인크리멘탈형을 사용하고 있어서 아마 딱히 결선을 손댈 필요는 없을듯한데요. 그리고 엔코더의 핀맵이 궁금하시다면 모터 제품명으로 디바이스마트에 검색해보시면 모터 재원에 언급되어 있을 겁니다. http://www.devicemart.co.kr/goods/view.php?seq=20463 여기를 가보시면 됩니다.