검색결과 리스트
글
아주 예전에 DC-Servo를 시작했다고, 이야기를 한 적이 있습니다.[관련글] 그리고 나서, 그 때의 경험으로 다시 RHex라는 로봇을 개발[관련글]해보고, 일단 1차 종료(결점을 보완해야하니까요)했다는 말씀도 드렸는데요.[관련글] 그리고, 나서 다시 DC-Servo를 이용해서 모바일플랫폼/모바일로봇이라고 부르는 주행로봇을 만들었습니다.
잘 생겼죠?^^. 이건 테스트 버젼입니다. 다시 색상이 들어가고, 일부 문제점을 보완한 것이 지금 제작중이에요^^. 이렇게 간단해 보여도 꽤나 많은 손길이 들어간답니다. 먼저, 저 바퀴만 해도 꽤 많은 공이 들어가구요. 사실 바퀴를 만든다는 것은 생각보다 신경써야할 것이 많습니다. 특히나, 양산을 생각하는 경우는 더하죠. 항상 주행로봇에서는 입맛에 맞는 바퀴를 선정하는 것이 생각보다 어렵거든요.ㅠㅠ.
그리고, 보셔서 느낌이 오겠지만, 구동 모터가 연결된 것은 바퀴 두 개 입니다. 그리고, 무게 지지용으로 또 하나의 바퀴가 있는 방식이지요. 일단은 정확한 움직임을 위해 필요했습니다.
아직은 테스트버젼이라 그렇지만, 저 선처리 부분은 바로 해소될거구요^^
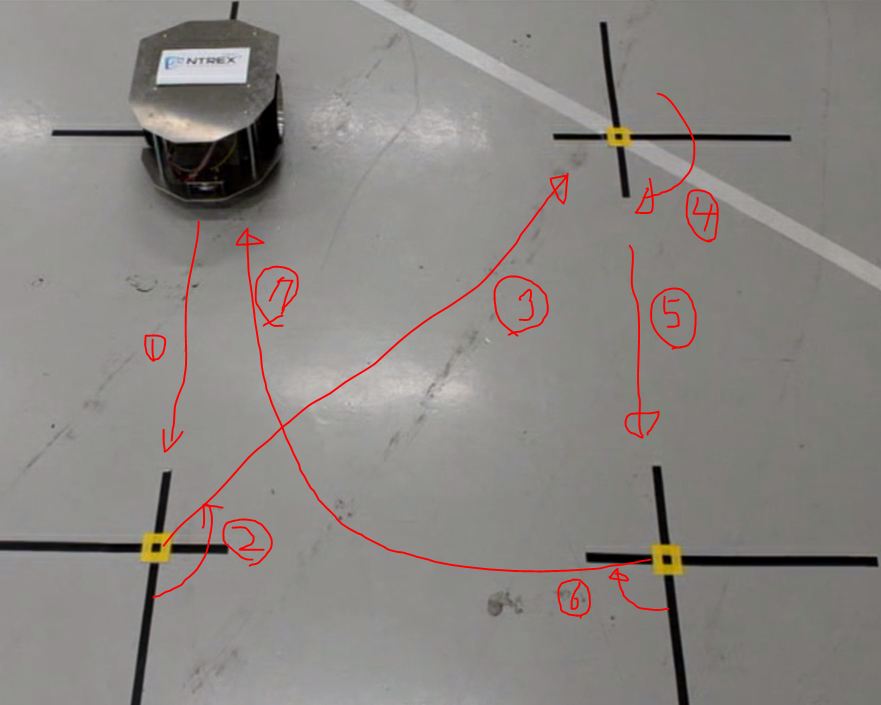
이제 좀 있다가 말씀드를 동영상의 내용을 설명을 드려야겠네요. 일단 저 화면에서 바닥에 있는 가로 세로 1m의 정사각형 선이나 마크들은 모두 동영상 상에서 다른 이들이 주행의 정확성을 확인시키기 위해 그어놓은 것으로, 로봇에는 어떠한 센서도 없습니다. 단지, 모터 두 개에 각각 엔코더가 달려 있을 뿐이지요.
먼저 1m를 직진합니다. 물론 작은 오차는 있습니다만, 그 상태에서 다시 135도 제자리 회전을 합니다. 그리고, 대각선으로 진행을 합니다. 다시 135도 회전을 하구요. 다시 1m 직진을 합니다. 그리고, 90도 회전을 하고, 1/4원의 원호를 따라 진행하면서 출발점에 도착을 합니다.
이를 위해서 모터 각각에는 DC servo 제어기가 장착되었으며, 직진, 회전, 원호주행 등을 소화하기 위해 모션제어기가 또한 탑재되었습니다. 이 로봇이 앞으로 어디로 갈지, 우리를 어디로 안내할지는 우리도 많이 기대한합니다. 아... 출시는 한 한달쯤 있으면 될거에요^^ 아래의 동영상 보세용^^
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| 모바일 로봇 / 모바일 플랫폼 - STELLA B2 (20) | 2012/08/10 |
|---|---|
| 모바일 플랫폼/모바일 로봇 STELLA의 주행 명령 테스트 (22) | 2012/06/01 |
| 모바일 로봇 / 모바일 플랫폼 - STELLA B1 (24) | 2012/05/21 |
| 모바일 로봇 / 모바일 플랫폼 테스트 中 (12) | 2012/04/05 |
| 무인탑승형 로봇. 전기차. 테스트중 (12) | 2012/04/03 |
| 무인 탑승형 로봇. 개발 중. 조향장치 서보 제어 (18) | 2012/03/08 |
| 실외 탑승형 로봇. 무인 자율 주행 전기차를 테스트 중이에요^^ (20) | 2012/02/29 |
| RHex 로봇 테스트 버젼 - 기능 업그레이드 (20) | 2012/01/14 |
설정
트랙백


녀석이 참 말을 잘 듣네요 ^^
그리고 마지막 대각선을 곡선으로 주행하는 것은 예술이었습니다.
좋은 결과 있으시길 바래요 ~~
네 그러게요.. 좋은 결과가 저도 있었으면 좋겠습니다.
우리모두 화이팅~~!!
와우 모바일 시대에 맞는 작품이군요,,이러다가 엄청 대박나서 부자되시면,...블로그 안하시는 건 아니겠죠,,ㅋㅋ 알지는 못하지만 논문부터 보던 1인이라...ㅋㅋ
네.. 감사합니다. 정말 많이 벌면... 블로그만 하면서 살고싶어요.^^
좋은 글 잘보고 갑니다..
즐거운 하루되세요 ^^
네 즐거운 하루 되세용^^
포스팅 잘 보고 가요~ ^_^
오늘도 좋은일 가득하세요~
네.. 좋은 주말 보내세요^^
안녕하세요 ^^
눈팅을 하다... 궁금한 사항이 있어서 이렇게 글을 올려 봅니다.
어찌 보면... 너무 초보적이고; 깊이 없는 질문일 수도 있으나... 아래와 같은 전달 함수를 구했어요(라플란스 영역)
output(s)/input(s)= (-0.0126s^3 + 0.0588s)/0.0916s^3 있을때.... C로 코딩을 어떻게 해야 할지 감이 안옵니다;;;
단순하게... s에 대한 값을 구해야 하는데요;;; 어떻게 구해야 할지... 아니면 s가 주파수 영역을 의미하니깐... 단순히 sampling frequency(fs)를 넣어주면 되나요?
너무 초보적인 질문이라서; 죄송합니다;
http://pinkwink.kr/437 에서 보시면, 단순한 라플라스형태의 식을 C로 구현하는 예제가 하나 있습니다. 그러나 복잡한 경우 적용되기가 좀 어려우며.. 그럴때는 블럭으로 바꾸고 다시 시도하시는 것도 괜찮습니다.
블럭으로 바꿔서 코드화를 시작하시는게...
http://pinkwink.kr/254 에서도 한 번 다룬적이 있습니다.
우와 나날이 멋진걸 만드시는데.. 전 자꾸만 제자리이다 못해 후진 하는 기분이에요 ㅠ.ㅠ
그런데 이제품은 세그웨이 처럼 1축으로 균형 잡는 타입인가요?
아니랍니다. 좀 더 좋은 성능이면서 좀 더 낮은 가격을 원하는 사용자들을 위한 플랫폼으로 바퀴 두개에 앞에 보조바퀴가 달린 3점 지지형태입니다. 그래도 낮은 가격에 비하면 서보 성능이 괜찮답니다.^^