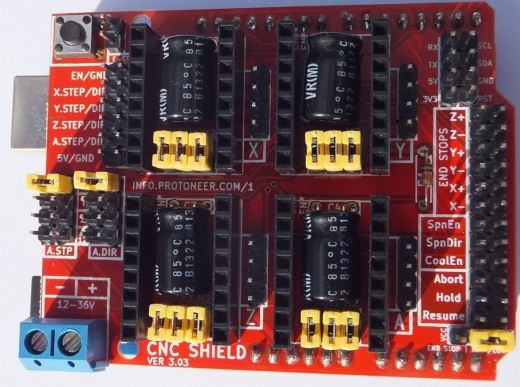
This is a quick guide to help with assembling the Arduino CNC Shield V3.XX.
Contents:
- Assembly Steps
- First Run
- Jumper Settings.
- 4th Axis Configuration
- End Stop Configuration
- Configuring Micro Stepping for Each Axis
- First step is to solder the Power Wire( or Fuse) and 10K (R1) resistor in place. (Version 3.03 and on does not need the Power Wire anymore.)
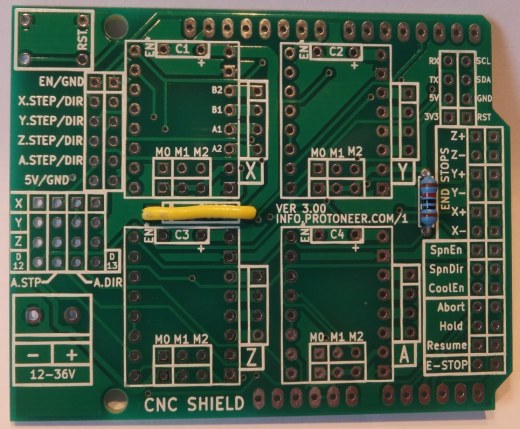
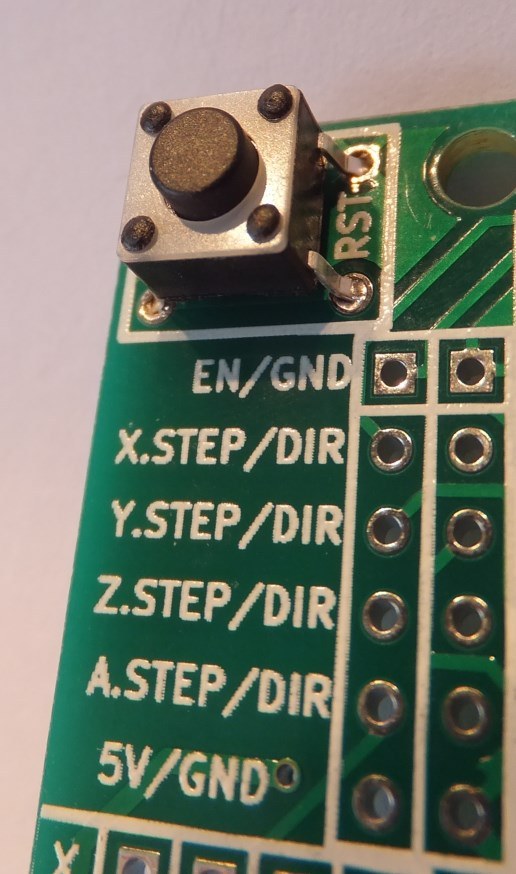
- Reset button is next.
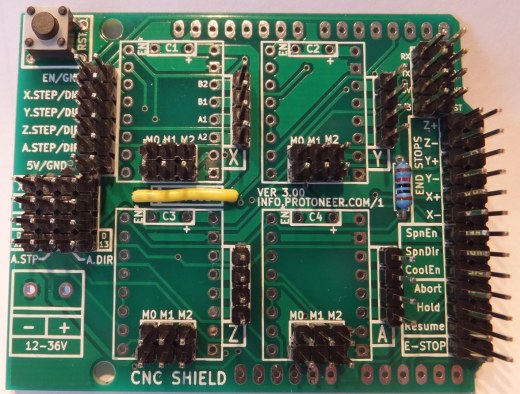
- Majority of the assembly work is soldering the provided header pins in place. For me the easiest way is to start with pins on one side and work to the other side. By doing this the board will lean-to one side forcing the next pins you are working on to be inserted all the way into the board (Ready to be soldered in place).
- Because of the height of the capacitors needed, we decided to mount them horizontally utilizing all the space under the stepper drives. This also leaves a bigger gap between the capacitors and the stepper drivers allowing more ventilation.
- To mount the capacitors horizontally start by bending the capacitor leads 90 degrees.
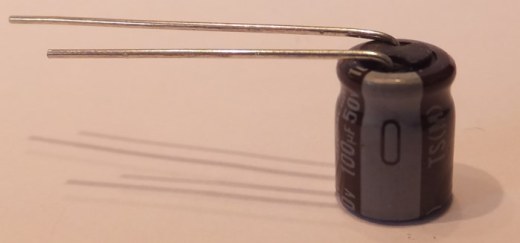
- Then solder them in place making sure that positive lead is on the side with the ” + “. Capacitors are usually marked with a ” – ” indicating the ground/negative lead.
- To mount the capacitors horizontally start by bending the capacitor leads 90 degrees.
- Before soldering the stepper driver headers in place it might be easier to solder the Arduino headers in place. I usually do it by inserting the headers into an Arduino board and then by placing the shield on top of them before I soldering them in place. This ensures that the headers are always aligned and straight.
- Last bits are to Solder the Stepper driver headers in place. I use the same principle as with the Arduino Board to align the Stepper Driver headers.
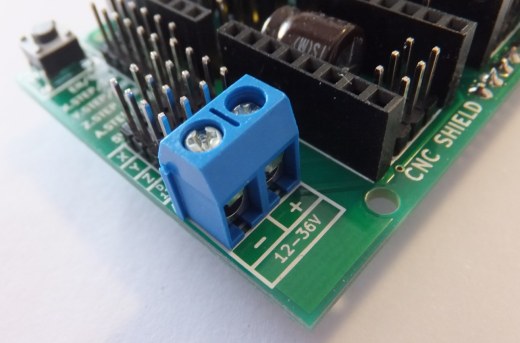
- Last but not least is to install the screw terminals for the power.
WARNING
The Arduino CNC Shield supports power supplies up to 36V. That does not mean that all Pololu Stepper drivers can run that high. A4988 drivers are not designed to run at 36V and will blow up the first time you power them up at that voltage. The 36V are for drivers like the Pololu DRV8825 that can run on +36V.
First Run
To make sure all parts function as they should, we need to go through a pre-flight checklist.
Pre-flight Checklist
- Do a visual check of all soldered points on the new board.
- Plug the shield into an Arduino board with a pre-installed copy of the GRBL Firmware.
- Open up a serial connection to the Arduino board and check if GRBL is running.(I use Putty to connect to GRBL)
- Pololu stepper drivers need adjustment and it’s good to have a read through their online manuals at Pololu.com
- Testing each stepper controller socket individually is critical.
- Make sure the external high voltage power is not power-up or connected
- Connect a stepper motor to the stepper controller socket you want to test. This is very important because the Pololu Stepper drivers are designed to ramp up the current till it reaches the needed current to run. Without a stepper motor connected there will be nothing to consume the current and you can end up damaging the stepper driver if it over-heats in the process.
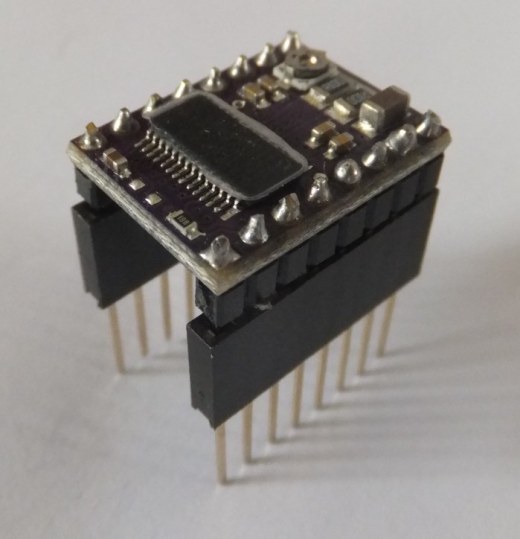
- Next, install the stepper motor driver ensuring that the enable pin on the driver aligns with the enable pin on the shield.
- Connect the external power to the shield, making sure you connect the power up the right way. If not connected the right way you can cause damage to the shield, stepper motor drivers and Arduino board.
- Send a g-Code to the Axis you are testing. The stepper motor should move if everything is working. (GCode Example : “G1 X5? or “G1 X0? or “G1 Y5?)
- Repeat the above process with each axis using the same stepper driver.(Testing with one driver reduces the risk of damaging multiple stepper drivers at the same time.)
- After all the above have been checked connect all the drivers and power up the system.
Tips and info
- When the stepper drivers are enabled they will make funny vibrating noises. This is normal. For more details have a look at this wiki page(Chopper Drivers).
- The stepper drivers will get warm and need cooling if they are going to be used for long periods. Small heat sinks and extractor fans are advised.
- Having extra stepper drivers is always handy.
- Some of the stepper drivers have thermal protection and will cut out if the temperature gets to high. This is a good sign that they need cooling or that they are over powered.
Jumper Settings
Jumpers are used to configure the 4th Axis, Micro stepping and endstop configuration.
The next few sections explains how its done.
4th Axis Configuration
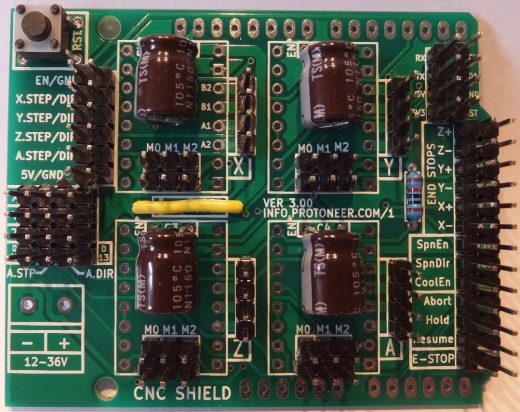
Using two jumpers the 4th axis can be configured to clone the X or Y or Z axis. It can also run as an individual axis by using Digital Pin 12 for Stepping signal and Digital Pin 13 as direction signal. (GRBL only supports 3 axis’s at the moment)
Clone X-Axis to the 4th stepper driver(Marked as A)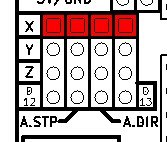
Clone Y-Axis to the 4th stepper driver(Marked as A)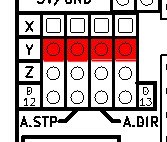
Clone Z-Axis to the 4th stepper driver(Marked as A)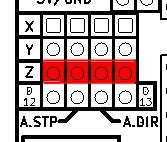
Use D12 and D13 to drive the 4th stepper driver(Marked as A)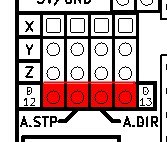
End Stop Configuration
By default GRBL is configured to trigger an alert if an end-stop goes low(Gets grounded). On the forums this has been much debated and some people requested to have active High end-stops. The jumpers in the picture provides the option to do both. (To run with default setting on GRBL the jumper need to be connected like the left shield in the image below)(This Jumper was only introduced in Version 3.02)
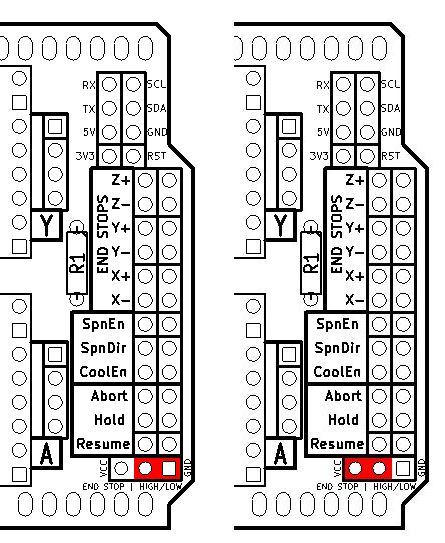
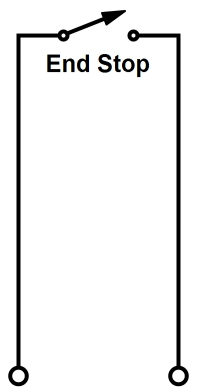
End-stop switches are standard “always open” switches. An End-stop gets activated when the end-stop pin connects to ground(When setup with default GRBL settings).
Configuring Micro Stepping for Each Axis
Each axis has 3 jumpers that can be set to configure the micro stepping for the axis.
In the tables below High indicates that a Jumper is insert and Low indicates that no jumper is inserted.
Pololu A4988 Stepper Driver configuration:
| MS0 | MS1 | MS2 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | Quarter step |
| High | High | Low | Eighth step |
| High | High | High | Sixteenth step |
Pololu DRV8825 Stepper Driver configuration:
| MODE0 | MODE1 | MODE2 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| Low | Low | High | 1/16 step |
| High | Low | High | 1/32 step |
| Low | High | High | 1/32 step |
| High | High | High | 1/32 step |
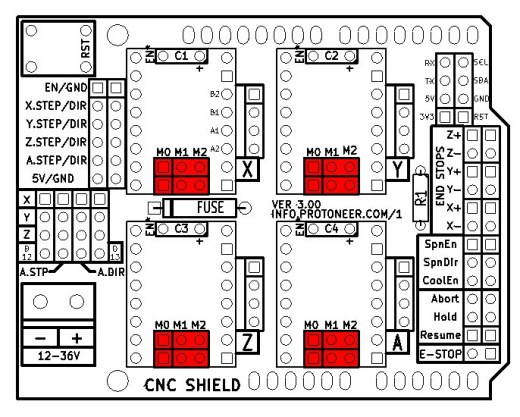
Example of full micro stepping (All 3 jumpers inserted for all axes ):
Related Posts
 Arduino CNC Shield – Assembly Guide
Arduino CNC Shield – Assembly Guide Arduino CNC Shield Project Builds – Turning a A3 Printer into CNC Machine
Arduino CNC Shield Project Builds – Turning a A3 Printer into CNC Machine Protoneer CNC Shield + Alamode + Raspberry Pi CNC Controller
Protoneer CNC Shield + Alamode + Raspberry Pi CNC Controller Arduino CNC – GRBL Shields / Boards
Arduino CNC – GRBL Shields / Boards Arduino CNC Shield – 100% GRBL Compatable
Arduino CNC Shield – 100% GRBL Compatable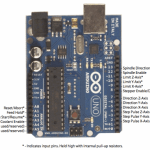 Grbl (Arduino G-Code Processor) – Pin Layout
Grbl (Arduino G-Code Processor) – Pin Layout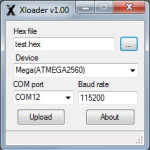 Quick GRBL setup guide for Windows (Arduino G-Code Interpreter)
Quick GRBL setup guide for Windows (Arduino G-Code Interpreter) Arduino to Raspberry Pi Bridge Shield – PCB’s finally Arrived.
Arduino to Raspberry Pi Bridge Shield – PCB’s finally Arrived.










Hi I wanted to know what the end stops xyz
how to connect it please email me
circuit connection example
Pingback: Arduino CNC Shield – 100% GRBL Compatable | Protoneer.co.nz
I do not like the end-contacts that close to reporting limits.
Indeed, if a wire disconnects, cut or is broken: bye-bye safety!
The best protection is achieved by linking the two switches “normally closed” which cause the stop opening the circuit.
In this way, if a wire is broken or disconnected, the cnc freezes immediatly at safety state.
I think the easiest and most effective is the program detects the discontinuity before each move….
Ideally, we could use these 3 entries to define the origin of each machine axes X, Z and Z; “home” Cnc?
Exceeding the limit causes an immediate stop, as would the emergency switch… And by using only one input for both!
(Sorry for my bad English)
Hi.
Thanks for your comments. Currently GRBL only supports “Normally Open” end stops as decided on by the head developers of the software. The Pins are configured with internal pull-up resistors and will only activate the interrupts on a state change(Grounding it).
This however does not stop you from writing your own code that will use “Normally Closed” end stops and splitting one of the 5V pins on the current board to work with it.
Hope this answers your question.
HI, I am newbie on arduino and I like to make CNC with Arduino uno.
About normal open switch design grbl, I think can install normal close with put inverted logic, this by transistor or TTL/CMOS inverter logic before Arduino pin.
At persent I am waiting some material and I like to test ArduinoCNCN end this month.
Thanks a lot for all information.
Regards.
Hi.
There are a few people that have converted GRBl to use Alwasy closed switches. Currently my shield only has pins for Normally open switches but I am
working on a revised version that will allow you to pick between normally open or normally closed switches,
Good luck with the build and have fun.
Regards,
Bertus
hello. have just built this shield. small query regarding tex y.step / dir what does it mean? en / gnd what does it mean
Hi. The EN/GND to 5V/GND row of pins are for connecting external stepper drivers to the board. The EN stands for enable and X/Y/Z/A.Step-Dir is the step and direction signal for each axis.
Hi Bertus!
Nicely made and super cheap! works great!!
Only one question:
How can I use the the A-axis. As far as I know original grbl firmware does not support an A-axis. As far as I understood from browsing the code, all step/dir pins have to reside on the same port, which I guess is not possible on the uno, only on the mega Arduino.
Greets from Austria!
Tom
Hi Tom,
The A-Axis is mostly used to clone X,Y or Z. But it can also accessed from pin 11 and 12 with custom software.
hello
i have 3 of this one
http://www.pololu.com/product/1182
can i use it with the board?
regards
Yes… This board was designed for them.
i mean because of the naming you made on the X-AXIS field
B2
B1
A1
A2
but the drivers in post above have other pin namings
2B
2A
1A
1B
or is it my decision?
Hi. The first letter is the coil and the second letter is the lead. Same thing just a different notation.
Hi
I have a problem..I have cloned the Y axis, I have two motors in this axe.
One motor running in one direction and the other runs in another direction.
I use 4 pololu a4988 , can you help me??
thanks!
Hi. To fix this you can swap one of the stepper motor cables around. That will invert the stepper direction.
thanks! I solved the problem !! I swap one of the stepper motor and all is ok now.
But I have another problem , more serious, two pololus have been burned, in the same socket, the x axis. The only noteworthy aspect is that one of the capacitors came beaten and put this capacitor on the x axis… is it possible???
The cnc works fine a minutes but then x axis don’t work.
I have put a big sink allways (12v).
thanks for all
First thing to note… never disconnect the steppers while the stepper drivers are powered. Doing that will over current the driver and could kill it permanently.
Best would be to double check the soldering on the x axis and replace the Cap incase its the issue. (Be sure to put the cap the right way around)
thanks for awnser.
I never disconnect the steppers when it is powered.
The soldering is ok – I started to solder 10 years ago-, I don’t think this is the problem. The cap is in the right way…. I’m going crazy…
This afternoon I will replace the capacitor… but is possible that this is the problem ??? the capacitor???
thanks for all!!! best regards!
hello all!
I replaced the capacitor and all is ok!
thanks for all!!!
Great stuff!! Regards.
Yes I know , I don’t disconnect the steppers while the stepper drivers are powered.
I have checked the soldering… and the cap is in the right way.
When I swap the pololu on the x axis works fine, but I’m worry to damage another pololu (I have only one pololu replacement.
thanks
I’ve bought the elecrow version of the board, I tried to use a pololu drv8825 which on the pololu site said its a drop in replacement for A4988 but the attached stepper does not move nor draw any current….any help appreciated…
Hi. Have a look at setting $15 in GRBL. It might be that it needs inverting to enable it… Please let me know how it goes.
There are 2 versions of the pololu DRV8825 a first version which has item nr 2132 and a second version with item nr 2133. The first one is missing the middle resistor on the bottom and needs some extra resitor attached to the sleep line. The second version works out of the box. All is working now, only had to reverse the stepper lines order for the X axis, Y and Z were identicial, I used 3 identical pololu steppers with the same wire color. I’ll soon post about my setup on my blog.
Thanks for the commnet. Yes, the first version, VERSION A needed a bit of help running but they work well once they are up. Looking forward to seeing your blog. 😉
What exactly dose this mean?!?
“In the tables below High indicates that a Jumper is insert and Low indicates that now jumper is connected.”
Doesn’t “insert” (as in inserted) mean connected?
Hi. I have updated the wording. Inserted and connected is the same thing, yes. A jumper’s function is to act as a removable connection between pins.
The site and documentation makes mention of a 4th axis with custom firmware. What would the custom firmware option be to run a 4th axis with this? And what type of 4th axis could it support, if grbl doesn’t support a 4th axis yet?
Hi Gregory…
With Custom firmware I mean non-GRBL firmware. In the past I have written little apps that moved all 4 axes independently but nothing as complicated as GRBL.
Regards.
My 13YO Daughter is about to put 2 of your kits together, it will not be the first kit for her.
Some thoughts;
Why no schematic? How to decide fuse/wire with no schematic or explanation?
Why not a PDF of these instruction, some of us don’t have good internet in all the location that we work…
Looks good otherwise so far
Thanks
Thanks for the feedback. Schematics is available : http://blog.protoneer.co.nz/arduino-cnc-shield/arduino-cnc-shield-scematics-v3-xx/
Version 3.01 and up does not use the fuse wire anymore. (I take it you have version 3.03)
PDF is a good idea. I have updated the site over the last few days and it would have been very helpful to have that. (I am also looking at upgrading to a wiki)
Do you have a project page? Kind regards.
Hi, I already ordered the V3 now. Sorry, it’s embarrassing, but where do I connect the motors on the board?
Kind regards
Hi. No worries. If you look at the following picture of the shield… http://blog.protoneer.co.nz/wp-content/uploads/2013/07/Arduino-CNC-Shield-V3-Layout.jpg
On the right of each stepper driver socket are 4 pins. These are the connections that go to the stepper motors. The X axis socket has marking to show how each coil
on the stepper needs to be connected.
Hi, an addition question. Is it possible to connect this controller to the shield?
http://www.ebay.de/itm/CNC-Manual-3-Axis-Handle-Controller-For-3-Axis-TB6560-Stepper-Motor-Driver-Board-/360730100023?ssPageName=ADME%3AX%3ADERP%3ADE%3A1123&ViewItem=&item=360730100023&nma=true&si=iWhacZJK9znWOx6hT936gXw%252F1Hc%253D&orig_cvip=true&rt=nc&_trksid=p2047675.l2557
Thank you
Hi. That pendent looks like it was designed specifically for the board it is used with. I don’t think it will work with the shield and modifying it will be as good as redesigning it.. 😉
Hi, thank you. Now I saw how the stepper needs to connect. I didn’t saw the labels beside the X axis.
The controller I thought has a standard connection like a game port. I thought it will be helpful to have a possibility to move the axis manually.
Sorry, but I have an other question now. I ordered 3x A4988 driver for the shield. Which power (volt) and min. ampere do I need for that? I want to upgrade my proxxon mf70 milling machine to cnc. So there are three axis to move.
Again, sorry for such rookie questions.
Regards
Don’t worry about the questions. The are all valid…
The firmware used : GRBL ,does not at this stage allow for a lot of manual control at this stage. It has pause, resume and abort. So it will need a lot more magic to make the controller do anything else but it is a pretty cool idea though.(Might look at some option in the future.)
Power supply wise… The A4988’s run on 8-35V DC. My suggestion would be to get an old PC power supply to start with. They usually have some beefy 12V rails that can supply plenty of AMPS.
To calculate the current usage is easy. Each driver can do a max of 2. So if you are going to use 3 go for a 6A power supply and maybe 8A for good luck. Having a power supply that has more Amps than needed means that the power supply will be under less stress and run cooler.
When you start getting into bigger stepper drivers it gets more interesting. Some Stepper drivers can do over 8A and having a power supply that is +24A gets very expensive. So they usually take into consideration that not all 3 axes will run at the same time and can then get away with a smaller power supplies. All depends on what you are going to do.
If you have more questions, please go ahead and ask. Kind regards.. 😉
Thank you very much for the detailed answers. One last question until I got the part in my hands. Is the Arduino powered from the shield or is it powered separately?
Hi, The Arduino is powered separately. 😉
hi and thank u for all your work . my first question was answered above as to where to connect my stepper . second question is a clarification actually : i have v3.03 (i think ) bought from ebay , drv8825 driver bought on ebay ( no pololu but chinese replicate ) and nema 17 12v 1,3a stepper . in drv 8825 schematic the connectors for steppers are from the opposite that u make them on your board . i looked in all your pics and u allways have the trimmer side of drv facing the 12-36v connector . is it like this ? dont wanna dmg the driver or my stepper as i run a very tight budget
thank u in advance
greetings from sunny greece
Welcome Giorgos from sunny Greece…
On the back side of the drivers there should be indicators of what each pin does. Look for the enable/EN pin on the driver and make sure that it goes into the pin on the Shield with the marking EN and you should be okay.
thank u , will do and get back to u with results
Hello, here’s from Brazil.
I got 4 boards from Elecrow, Ver. 3.01, to test, and determine if I should use it in all machines that I will sell soon., to buy more.
The Elecrow have the last Ver. 3.03?
My system uses the DRV8825 with a 36V power supply. Pulley 20 teeth, GT2 belts 3mm, and Nema 23 (2A parallel bipolar) Steppers. I reach 20,000 mm / min in search =]
I’m using a Openbuilds system, like a OX Cnc machine, with some custom plates/design.
But I am having problems after installing your cnc shield. I guess it’s about the Enable/Reset/Sleep/Fault pins.
All DRV8825 pins are connected to the CNC Shield. It’s the new one, md20B.
I tryed to change the “(invert step enable, bool)” GRBL.
If I keep $15 = 1 (in fact, I’m with GRBL V0.9, then it’s $4 = 1), the steppers hold. But when I sent a move command, the steppers shuts down. There’s no movement, and I can spin the stepper freely with hands (until the command ends, then the motor hold again).
If I come back to the default, keeping $15 = 0 ($4 = 0), the stepper is turned off, ie, there is no hold. But it turn on when sending commands +/- axis. The axes move, but when they stop, they shuts down, and can’t hold again.
I always used these DRV8825 in the simple way to run, without endstop, etc, using this connection diagram: http://b.pololu-files.com/picture/0J4232.600.png
Enable/Fault = Disconnect
Reset/Sleep = +5V
What do you think? I have to disconnect some of this four pins?
I have the Ver. 3.01.
Thanks to make this board, and to Elecrow for send it full assembled.
ps: Do you know where I can buy the 8825 full assembled too (pins welded), and maybe with the heat silk glued? I hate to weld electronics, and I love plug-n-play systems.
jeferson (at) protoptimus (dot) com (dot) br
Hi.
What you are describing is normal. GRBL will go into idle mode after set amount of time. This can be changed by setting $7 – Step idle delay to 255. It will keep the steppers enabled at all times. Just keep in mind that this could cause things to get very hot. Not sure about assembled stepper drivers but Ebay is a good place to start.
Thanks! I never used the enable pin before. Now it’s perfect.
Do you know if is possible just turn on/off a 3 phase spindle with the Grbl? I got the chinese one, with the Huanyang Inverter (HY01D523B).
I tried this: http://www.shapeoko.com/forum/viewtopic.php?f=3&t=2689#p20719
Hi, on this board the pin of ” SpnDir “. How can i connect and control the spindle to this pin? Thank you.
To use this you need a spindle that uses an 5v input to control the direction. The spindle enable pin can be used with a relay to switch an AC spindle.
Hello,
I’m a total newbie at this, and I would like to know how to connect the pins below the capacitors and more importantly, where and with what to connect them in case I would like to set up half step mode. You showed the picture with full microstepping but I can’t really help myself with that, because you probably have to wire things up….
Sorry for dumb questions, but I’m a Mech. eng. and not electrical and rarely work with electronics…
Regards
I managed to make the half step setting, I see it is totaly easy…
What I am wondering is how complex shapes can you make with Arduino Uno, I mean Arduino UNO is one of the weakest (besides duemilanove) on the market and I don’t know how easy is it for interpolating several complex shapes at once?
Can the same shield be used with lets say Arduino Mega? Or should there be made any additional changes with wiring?
Regards
Hi. You will be surprised at the capabilities of the ATMega328P…
GRBL that runs with the CNC shield works from steaming G-Code. What that says is that the complex drawings you are talking about gets broken down into a file with hundreds of lines of commands to make movements and that is then sent to the Uno one command at a time ending up with a complex design being machined. The shield should be okay with the Mega but the software does not official support it. My suggestions is to give it a try on the UNO before you look at other options… Kind regards.
First off, thanks for designing an awesome controller, and for your prompt customer support in previous user questions.
I have constructed the controller and now I’m trying to plan the motor wiring. My motors are rated at 3A per phase and the DRV8825 drivers are rated at 2.2A each. My questions are:
What gage wire should be used connecting the 4 pin axis headers to the motor? What is the current rating for the headers? Also, would the 2.2A current be divided by the 4 pins, or would each pin receive the full current since it is pulsing through each to move?
Thanks for the help!
Ah. Also wanted to add that my system is running on 24V. Voltage is always a relevant consideration when discussing power ratings 😉
Voltage is actually not so important with these Chopper drivers. They will ramp up the voltage till they get to the set current and then cut the power. That is also the reason why they are so noisy and why the steppers can be run at multiples of the rated voltage.
Sorry for the late reply and thanks for the email. The headers for the stepper motors are rated at 2amps each. The max current is actually dependant on the female headers that are used with the stepper wires. Cheaper molex connectors are rated at 1amp with more expensive versions rated at 3amps.
The problem you are facing is that at max amps things get noise and it is better to solder the cables in place than to have removable headers.
The DRV8825 might be rated at 2.2Amp but it would be hard to run them stable at that current. They are very sensitive to heat and will need cooling. There is also the the quality issue with Pololu drivers being better designed to deal with heat than some of the Chines versions.
As for the question on current per pin. Biopolar steppers have two coils and when doing full steps one coil will be fully powered and one not. My assumption is that two of the pins will be sharing the up to 2.2amps of current at a time. With micro-stepping on average this load is shared over the 4 pins because at 1/2 steps the coils will be sharing the power at 50% per coil.
Picking the right wire is pretty simple, make it at least as thick as the wire coming from the stepper as the installed wire will be defining factor.
3Amp steppers are actually not the most efficient steppers for these stepper drivers. Best would be to go for steppers rated at 2 or just below that. If you really want to drive 2amp and up I would suggest looking at Gecko stepper drivers.
hello bertus,
could you tell me where i can buy a spindle for this shield? what about wiring?
Its a bit of a “how long is a string” question. I am looking at using motors used for RC cars. The brushless motors from Hobby King are pretty good and run at +10K rpm. Things that does set spindles appart are how much side forces they can take and how long they can run without over heating. I have been tempted by this monster for a while :
It is water cooled and if you power it correctly will go well over 40K rpm.
hello, my ask is… i see in the shield there is SPNen and SPNdir, ho could i wire a simple 2 wire DC motor? Only use the SPNen?
Best is to use a relay with the motor. The DC motor needs more current than and Arduino can provide from its IO pins. There are plenty of relay board available that are 5v compatible.
Hi Sorry to sound a little dumb… But can you confirm that SpnEn on the shield “connects to” Arduino pin 12? Also why are there two pins each for SpnEn, SpnDir, etc. Is one of them Gnd? If so which one. I am hoping to switch the spindle on and off via software and a spindle control board.
Have a look at this link. It depends on the version of GRBL you are running.
Thanks Bertus but unfortunately I do not see a link in your post
Andrew
sorry for that… https://github.com/grbl/grbl/wiki/Connecting-Grbl
In step 5D you say to “make sure you plug the power in the right way”. What is considered the right way?
My thought is that I could use a PC power supply and connect the -12V and +12V to that blue connector.
Would this be the right way?
A PC power supply can be used. On the blue connector, connect the “-“(ground) up to the Black wire side of 12V and the “+”(positive) up to the yellow wire of the 12V side.
Great Thanks! After checking that there is indeed voltage coming out of the power supply, and connecting it up to the board, I can’t get the board to spin the motor. I’m issuing the commands given above “G1 X5?” but the motor doesn’t move.
What can I do for further testing?
Is GRBL reporting position back? This seems like it might be a GRBL settings issue.
This now works…I had to use G0 X1.0 to get it to move….
Excellent… 😉
Hello I bought a uno + cnc shield + (4) A4988; for a laser engraver; is it possible to use SpnEn pin to fire the laser?? I´m new to the whole thing, so forgive my ignorance please, if you have a better suggestion, please!
Regards
Dimi3
It is possible yes. Have a look at this discussion for more detail. https://github.com/grbl/grbl/issues/325
hello Bertus Kruger. i’am using cnc shield + arduino + laser. but i don’t know how to connect laser into cnc shield.
Can you help me?
(
Hi. It if its a simple on/off laser all you have to do it to connect the laser enable pin to the spindle pin on the board. Arduino pins are low current and will not power a laser, so use some kind of relay or transistor to drive more power.
Pingback: CNC-SHIELD-3.00 | ZDVstore
Hello Bertus i bought the protoneer cnc shield , is it possible to controle the cnc spindle motor with VFD like this one : http://www.jinlantrade.com/Stock%20files/0008.jpg
https://www.buildyourcnc.com/item/electronicsAndMotors-parallel-breakout-relay#prettyPhoto/4/ don’t now with wire to connect to cnc schield .
thanks in advance
kind regards
stefaan
From what I can see it might not be that easy. Correct me if I am wrong but VFD does not run at TTL/5V levels?
With the GRBL v0.9 there is now an option to do spindle control with PWM, that might be an option but if it runs other voltages you will need a converter first.
Hi Bertus,
I just assembled today my first CNC Shield. Went well. Then I started to follow your “pre-flight” checklist, checked that grbl was still working fine with the shield plugged, then started to send commands to X, as it’s where I plugged the pololu.
I heard a distinct sound of stepper enabled, but no movement.
Then I tested Y and Z, there the motor (same one) moved.
Then I decided to test A, cloning Z. Same as before, no move
So I tried, still on A, but cloning Y. Works!
I don’t have a clue on what to look for! I was thinking I might reflash GRBL, as it seems the problem is in the firmware rather than in the shield.
Ever seen that before? Any idea on some tests I could make?
Thanks in advance!
Hi. What version GRBL are you running. I noticed that some imports of GRBL 0.9 has the PWM configuration on by default and that will not work with the classic pin layout used with this board. (It swaps the spindle and z-limit pin)
Hi, This is a video of my first run of my CNC machine using 3.03 GRBL shield. In the video, I’m doing only two movements : 100mm travel in y and 100mm travel in x. You can see the machine stop and go many time and there is a very strange noise coming out of the motor controller shield or the Arduino uno. Any clues about the problem?
video : https://youtu.be/t7LtLhKQfGU
thank you
I just found this: the sound does not come from the shield or the arduino. It came from the z stepper. This is strange because no command is send to the z stepper when it’s making nose.
Stepper drivers will still power the steppers while they are not moving. Think of belt driven machines, they have very little resistance(z axis will move down because of gravity) and if the stepper is not held in position it will start to turn/move. Does the noise frequency change if you reduce the current setting on that stepper driver?
Hi. What is the stepper driver temperatures like? I know the DRV8825 drivers are very sensitive to heat and I would say running them without heatsinks will be hard. The run , stop can be thermal cut out. These drivers are also pretty noisy when standing still(holding current). Have you tried swapping the stepper drivers, if the swap changes the problems to another axis it could be a driver issue. Also double check solder joints on the problem axis.
Hi if I have V3.00 board that E-STOP jumper at the bottom is this “End Stop” or
“Emergency Stop” and is it fail to safe meaning must it be shorted to GND for the board to work
Hi. The E-Stop is for “Emergency Stop”. (End-stops are divided into x,y,z connections). The E-Stop pins can be connected to a “Normally Open” switch else it should be left unconnected. When the button is pressed the System will be rebooted.
Hi there, I found a short mention about powering the shield and arduino board but not fully detailed.
Do I need to power both, shield and arduino boards from 12V or is it enough to power the arduino from USB and the shield from a 12V(or higher) source ?
Hi. Yes,Powering the Arduino from USB and the Shield from the +12v is the way to do it.
Great , thanks.
, thanks.
Hi, I am fixing to configure my first cnc with uno and cnc shield v3. I have a question regarding the changes in grbl 0.9i. Do I just connect spindle to z endstop pins and z endstop to spindle enable pins? Is the current through pins sufficient for 1.7amps spindle draw? I had planned to use a digital relay. Also, I had planned to use high and low endstops. If I just switch the pins, should I wire the endstop switches parallel to one another external to the shield? Any help would be greatly appreciated.
Hi. Yes, those are the only pins that swapped in V0.9i. the pins can only source a few milli amps and needs a transistor to driver higher current.Yes, on the end stops. Keep in mind that GRBL is configured for always open end stops.
Hi, Bertus.
On the board, i see a CoolEn conector.
What that means?
Is it a conector for a cooling fan?
Hi Isaac, the CoolEn is an 5v output pin that goes when the Coolant G-Code command is entered. The pin it self can not be used to run a fan as the output pins on Arduino’s can’t source more than a few milli amps. This pin however can be connected to a relay to switch on a fan.
Hi,
i´m wondering how to connect any kind of “spindle enable” in grbl 0.9 on the cnc shield!? Do i have to connect the sondle enable to Zx Endstop?
Yes, you will have to swap the two pins.
I´ve done so, but now i am not able to control my laser relay with M3/M5 anymore…
With the default PWM settings enabled you need to run the S command to enable the spindle. From memory S is 0-1000 with S1000 being spindle at 100% power.
Hi Bertus thank you for the information here.
I am facing a strange problem with my driver . My Cnc shield is Ver3.03 and driver is A4988 set for Nema17 for shapeoko2. I am using all four driver slots.
One of the A4988 driver does not allow the Arduino to turn on, if 32 steps jumper is selected for that specific slot.i.e when m0,m1,m2 is inserted.
but the same driver board work with 4 step setting i.e 1 or 2 jumpers only.
So I had to configure my Y axis parameter for 4 steps and rest axis for 32 steps which is awkward.
Is it a faulty board or can I do something to enable 32 steps for this particular board I have only 4 driver boards and it takes long time for shipment to reach my place for new drivers.
Regards.
Hi Jay, The Pololu A4988 driver only support up to 1/16th micro stepping. https://www.pololu.com/product/1182
Hi, I too am using Pololu DRV8825 drivers but I’m confused about which way round they are supposed to go in this CNC Shield V3 board.
Do they go with the variable resister nearest the bottom of the board (facing towards where it says ‘CNC Shield’) – like every picture I’ve seen of the A4988 drivers in situ, or should the variable resister be facing the top of the board (facing towards the ‘Reset’ side of the board) – this way would match the schematic on the Pololu website, and I have seen some pictures of this layout. Just checking because I don’t want to destroy my drivers!
Check the enable pins align on the board and the stepper driver.(EN)
OK thanks, yep got the steppers to move correctly in each direction.
Next question is for the limit switches, is it the Common and Normally open pins on the micro-switches that connect to the end stops on the CNC shield V3?
yes… Normally Open switches with shielded cable and a properly grounded machine.
Hi!
I’m complete noob in the Grbl word, but not in the Arduino one.
I am trying to connect a CDROM step motor, but can´t manage to have a smooth motion. Each time I send a command it moves but with a lot of hiccups, instead of a nice “ZZZZZZZZZ” noice, I get a “BrrZBrrZBrrZ”, and the motion is not clean.
I assume I might need some jumper somewhere and/or need to setup the Grbl with proper values.
Can anyone assist me?
This sounds like it could be the stepper motor wires being hooked up wrong. have a look at http://blog.protoneer.co.nz/stepper-motors-wiring-up-a-bipolar-stepper-motor/ Have you swapped out the stepper driver as another test?